


Machine Learning for Automated Detection of Shipwreck Sites from Large Area Robotic Surveys
Completed
Overview
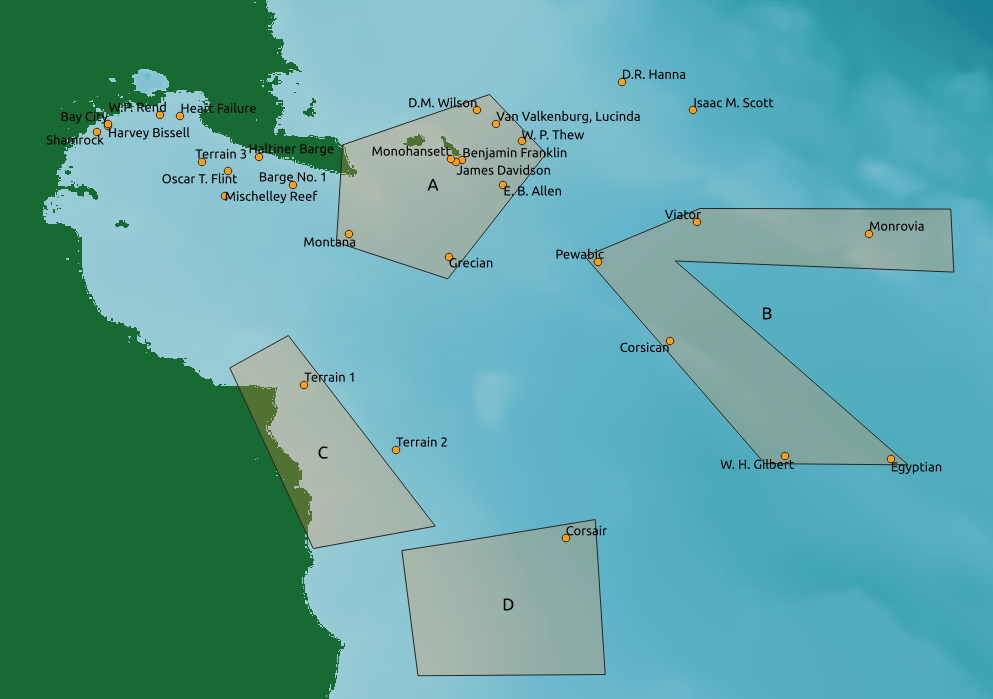
Due to its maritime history and strategic location, Thunder Bay National Marine Sanctuary contains almost 100 known shipwreck sites, with over 100 shipwrecks still left to be found. Shipwrecks can help us better understand our past, but discovering and exploring them is expensive, time-consuming, and labor intensive. By advancing and training the capabilities of marine robotic systems to search for and survey shipwreck sites autonomously, scientists aim to increase the efficiency and decrease the costs associated with such exploration efforts. In 2022 and 2023, a multi-institute team of researchers conducted expeditions in Thunder Bay to do just that.
Part 1: May 23 – June 3, 2022
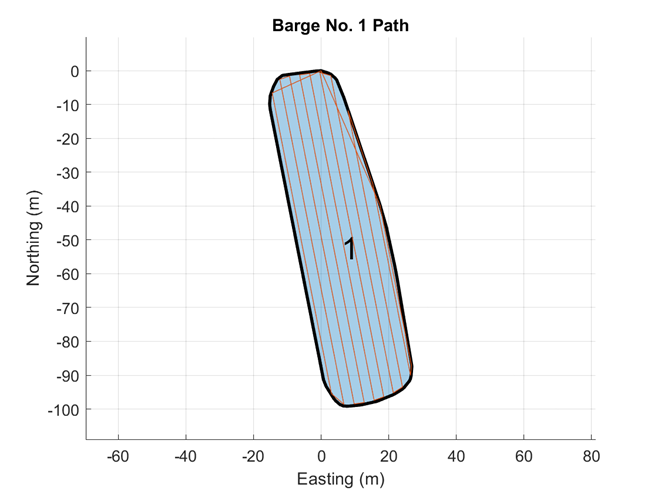
The main goal of the first year of field expeditions was to collect datasets to develop machine learning methods for shipwreck detection from sonar imagery. The team also conducted preliminary imaging surveys for close-range inspection of shipwreck sites with robotic systems.



Part 2: June 5 – 23, 2023
Building on the previous year’s work, the objectives of the second year of this expedition were to validate and demonstrate our shipwreck detection and exploration pipeline, and to continue to collect sidescan data of shipwreck sites in Lake Huron. In addition, a secondary mission was to perform exploratory searches for shipwrecks in areas with high potential for new discovery.



Project Update
In 2025, the AI4Shipwrecks open source dataset that resulted from this project was one of ten projects selected to be part of the National Science Foundation’s National Artificial Intelligence Research Resource Pilot project. This project “aims to connect U.S. researchers and educators to computational, data, and training resources needed to advance AI [artificial intelligence] research and research that employs AI.”
Multimedia
The images and videos from this project add context and help bring the project to life. Click on a preview image below to view the full image/watch a video and get more information.
Education
Our Learn & Discover page provides the best of what the NOAA Ocean Exploration website has to offer to support educators in the classroom during this expedition. Each theme page includes expedition features, lessons, multimedia, career information, and associated past expeditions. Below are related top education themes for this project.
Team
Each team member’s path to this project is unique. Read their bios to find out what makes them ocean explorers.

Assistant Professor, University of Michigan, Department of Robotics

Assistant Professor, Louisiana State University, Department of Mechanical and Industrial Engineering

William and Gloria Jackson Professor, Computer Science, Michigan Technological University

Robbins Professor of Sustainable Marine Engineering, Great Lakes Research Center, Michigan Technological University


Resources & Contacts
- Libby Haydel
Louisiana State University Media
ehaydel1@lsu.edu - Marcin Szczepanski
University of Michigan Media
marcins@umich.edu - Gabe Cherry
University of Michigan Media
gcherry@umich.edu - Cyndi Perkins
Michigan Technological University Media
cmperkin@mtu.edu - Stefanie Sidortsova
Michigan Technological University Media
ssidorts@mtu.edu - Emily Crum
Communication Specialist
NOAA Ocean Exploration
emily.crum@noaa.gov