


The Search for Norlindo – The First World War II Casualty in the Gulf of Mexico
The Technology of Discovery
Leonardo Macelloni and Leila Hamdan, University of Southern Mississippi
The areas where the shipwreck Norlindo presumably sank are located between 300 to 1200 meters (985 to 3,940 feet) water depth. These depths are inaccessible for direct human exploration, and thus we rely on advanced technologies including high-resolution sonars, autonomous underwater vehicles, precise positioning, remotely operated vehicles, and communications to put electronic ‘eyes’ on the seabed. Such sensors and platforms now make it possible to obtain completely new insights of the seabed, inclusive of natural environments and ones added by humans, including shipwrecks.
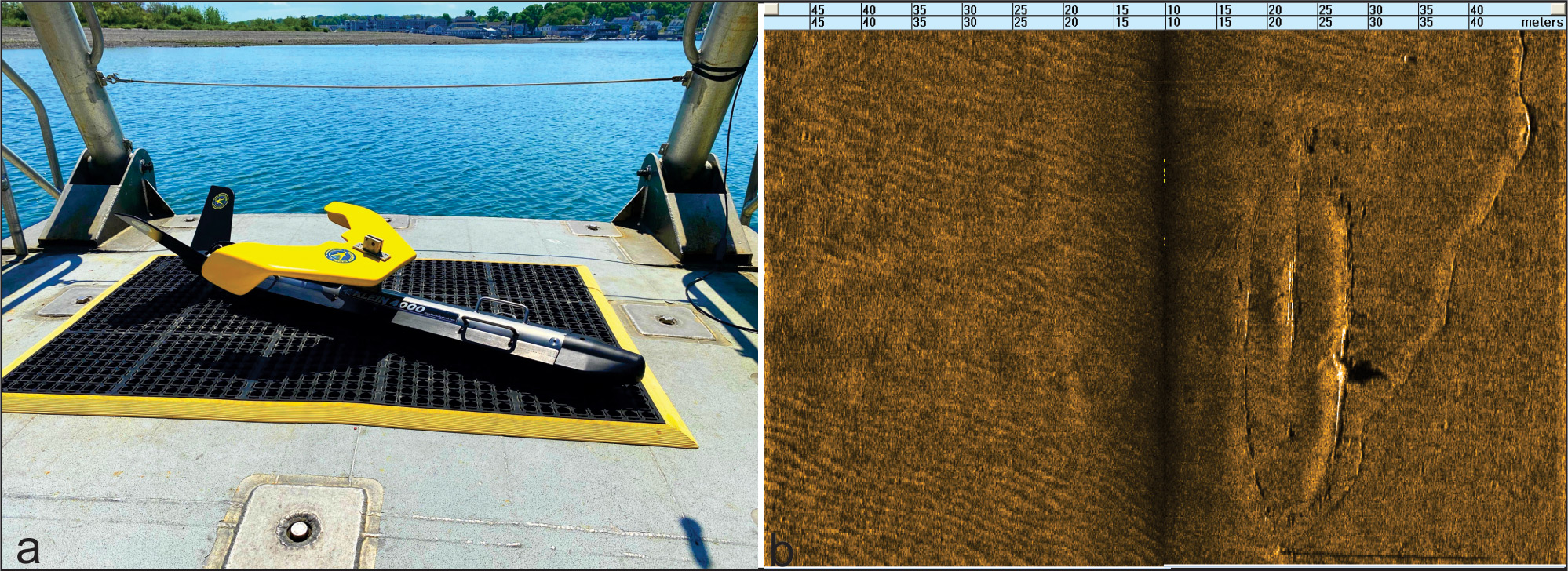
For the search for Norlindo, the University of Southern Mississippi (USM) will employ the Klein 4000 high-resolution side scan sonar (SSS), towed from the Research Vessel (RV) Point Sur, and a high-resolution multibeam echosounder (MBES) deployed on the USM autonomous underwater vehicle (AUV) Eagle Ray. Both systems are advanced acoustics sensors that use beam-formed sound signals to detect features on the seafloor. SSS and MBES can map a swath of the seabed, and surveys are generally carried out so that adjacent swaths cover 100% of the seafloor producing high-resolution, three-dimensional reconstructions, with information about sediment distribution (seafloor reflectivity or backscatter). The Klein system is multi-frequency, built to meet the demanding requirements for long range, deep-water operations and optimized shallow water performance. The system also provides high-resolution sonograms with unprecedented details of great support to archeological missions.
 and an example of a sonogram depicting a shipwreck (b). Klein – A MIND Technology Business’ System 4000 is built to meet the demanding requirements for long range, deep-water operations and optimized shallow water performance.")
Figure 1. The Klein System 4000 side scan sonar (a) and an example of a sonogram depicting a shipwreck
(b). Klein – A MIND Technology Business’ System 4000 is built to meet the demanding requirements for long range, deep-water operations and optimized shallow water performance. Image courtesy of MIND Technology Download largest version (jpg, 822 kb).
{kind=link}
 and an example of data (b).")
Figure 2. The Eagle Ray (a) and an example of data (b). The bathymetric data can be seen in multiple fashions such as: cloud points from different views (upper and lower left panels); a color-coded surface (upper right); and backscatter imagery (lower right). The example refers to a shipwreck found by Eagle Ray during an exploratory mission at Viosca Knoll 821. Image courtesy of Software Caris Hips and Sips. Download largest version (jpg, 2.9 MB).
Eagle Ray is a torpedo-shaped Explorer-class AUV rated to 2,200 meters (7,218 feet) depth. It is approximately 5 meters long (~15 feet), by 1 meter (3 feet) wide and weighs 882 kilograms (1,944 pounds). Eagle Ray can conduct autonomous surveys for over 24 hours with a Lithium-ion battery bank driving a single thruster and six control planes. It is equipped with inertial navigation and payload sensors as well as communications and tracking equipment. It also features ample wet and dry payload capacity for integrating and evaluating new sensors.
USM’s Eagle Ray will be equipped with a Norbit iWBMS for the Norlindo search expedition, and it will fly at a constant altitude of 50 meters (164 feet) above the seabed so that a high-frequency MBES (200 kHz) can be used in deep-water to collect high-resolution bathymetry. This is an improvement over surface vessel mounted systems, where acoustic signal would be absorbed in the water column. Using Eagle Ray, our goal is to spot Norlindo. The iWBMS emits 512 beams per swath and records bathymetry, co-registered seafloor reflectivity and water column backscatter. The latter is an important tool to track potential fuel leaks escaping from the wreck. Expedited data processing after the AUV has been recovered will allow our team to map the seabed at 3-meter (9.8-foot) resolution and focus the search through multiple missions.
When a promising target indicative of the shipwreck Norlindo is found by either the Klein Sonar or Eagle Ray, the team will finally put ‘eyes’ on the seabed. For this aspect of the discovery, we will deploy remotely operated vehicle (ROV) Global Explorer operated by Oceaneering, to verify the site. Global Explorer will enable a live 2D and 3D visual inspection of the site. Upon arrival on the seabed, the ROV will collect high-definition video and still images to document and reconstruct the archaeological history of the wreck. The team will also use the ROV to collect sediment cores on radial transects around Norlindo to continue to explore shipwreck microbiomes on the seafloor. In total, the technology of the Search for Norlindo expedition will help locate, explore and study hidden cultural and ecological resources in the Gulf of Mexico.

Figure 3. Remotely operated vehicle Global Explorer being recovered after a World War II shipwreck investigation in 2014. A seven-function manipulator arm, Jason-style push cores, and still and video cameras support discovery. Image courtesy of The Search for Norlindo Expedition. Download largest version (jpg, 1.4 MB).
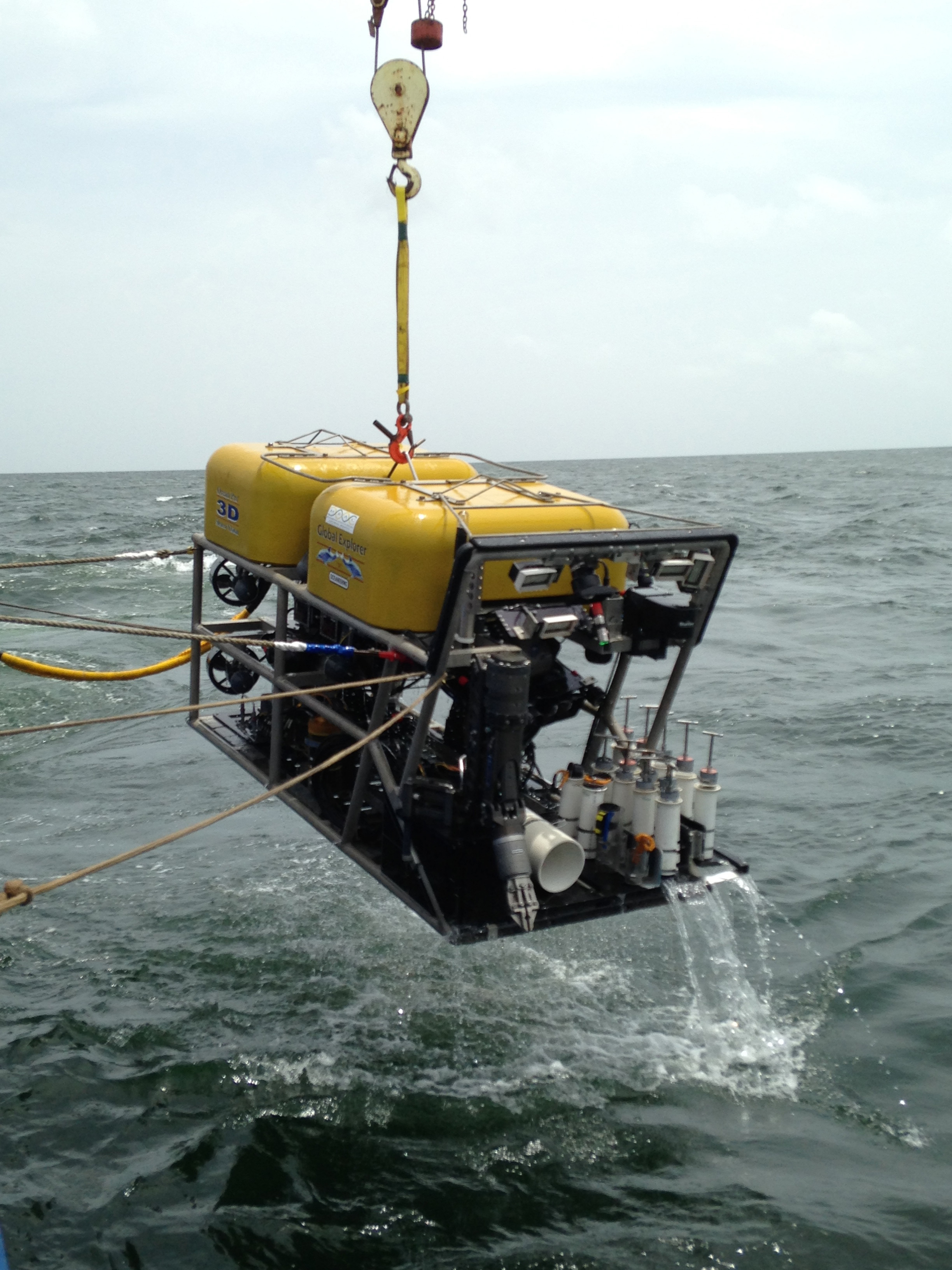{kind=link}