




























The research vessel (R/V) Melville. Click image for larger view and image credit.

This view from the bridge of the research vessel (R/V) Melville shows Captain Chris Curl at the helm, skillfully commanding the ship and all operations aboard the ship. Click image for larger panorama view QTVR
Submarine Ring of Fire 2006: Technology
R/V Melville
The Submarine Ring of Fire 2006 mission will utilize the research vessel (R/V) Melville as its marine base of operations. Built in 1969 for the US Navy, and refitted in 1992 with a variety of advanced research gear, the ship is operated by the Scripps Institution of Oceanography. Scripps' research ships, available to scientists around the world, have steamed more than six-million nautical miles in support of science and the academic community.
Jason ROV
Jason is a remotely operated vehicle (ROV) system designed by the Woods Hole Oceanographic Institution’s Deep Submergence Laboratory for scientific investigation of the deep ocean and sea floor. It is a two-body ROV system, with Medea serving in a tether management role that decouples Jason from surface motion. Together they offer wide area survey capabilities with Jason as a precision multi-sensory imaging and sampling platform. Both Jason and Medea are designed to operate to a maximum depth of 6,500 m (21,385 ft), are transportable, and can be operated from a variety of vessels.
Jason is connected to Medea by a neutrally buoyant tether that is 0.84 in in diameter and about 35 m long. Like the tow cable, it uses three copper conductors and three single-mode optical fibers; additionally, it uses Spectra fibers to provide strength while reducing size and weight. The tether has a breaking strength of 41,000 lb. Medea weighs 1,200 pounds in air and is maneuvered by controlling the surface ship’s position within a dynamic positioning reference frame.

Here in the R/V
Melville's control van, the scientific party intently looks at their computer
screens. ![]() Click
image for larger panorama view QTVR
Click
image for larger panorama view QTVR
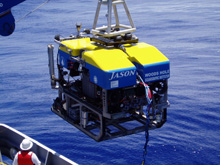
The Jason remotely operated vessel. Click image for larger view and image credit.
Movements of the support ship maneuver Medea by utilizing dynamic positioning. The Jason ROV is propelled by six DC brushless electric thrusters that provide about 600 lbs thrust in the vertical, longitudinal, and lateral directions. The vehicle has excellent passive stability in pitch and roll. Jason is designed for detailed survey and sampling tasks that require a high degree of maneuverability. It weighs about 8,000 lbs in air but is neutrally buoyant at depth. Jason’s closed-loop controlled dynamic positioning abilities make it a very maneuverable and stable platform.
Both Medea and Jason have been designed to be superior real-time optical imaging platforms with high quality cameras and lighting. The vehicles work together to provide lighting for each other in a fashion not commonly available in other submersible systems. Medea is configured with a silicon intensified target (SIT), black-and-white camera for terrain identification and visual location of Jason when both are operating.
Jason's sample tray can be configured in a variety of arrangements to accomplish the scientist's objectives. Typically, Jason will carry water samplers, push-cores to collect sea-floor cores (mud!), a "slurp" pump to collect critters, and a temperature probe to record the ultra hot temps of water coming out of the hydrothermal vents. Many researchers want to collect rocks, which Jason picks up with its manipulators. Up to 310 lbs of samples can be stored on Jason's tray and brought back to the surface.
Once Jason is in the water, it takes 3 people to operate it: a pilot who "flies" the ROV; an engineer who monitors all the systems (electrical, mechanical, hydraulic, etc) and operates the winch, which pays out/hauls in the fiber optic cable attached to Medea; and a navigator who positions the research vessel so that Medea and Jason can operate in the desired area. Because the vehicles are capable of operating 24 hrs per day, 3 shifts of people are required to run it. Therefore, 9 people go to sea with Jason — plus a 10th person, responsible for organizing all the data collected!
The first Jason ROV began its career in 1988 and retired in 2001. During that time, Jason made 253 dives with 4,683 hrs on the bottom! The longest dive the first Jason made lasted 117 hrs. The new Jason ROV has been in operation since 2002. So far, it has made 183 dives have been made with 3,249 hrs on the bottom.
Sign up for the Ocean Explorer E-mail Update List.