

ROVs are underwater robots that are tethered to a surface ship by a long power and communications cable and controlled by pilots aboard the ship. Autonomous underwater vehicles (AUVs) are underwater robots that are not tethered but are instead controlled by a pre-programmed onboard computer. Both types of vehicles need specialized technology to overcome the challenges of exploring the depths of the ocean. These challenges include high pressure, low temperatures, darkness, corrosion, and slow communication.
Ocean Exploration Technology:
How Robots Are Uncovering the Mysteries of the Deep
More than 4,000 kilograms (9,000 pounds) of equipment. Over 900 meters (3,000 feet) of electrical wiring. Twenty-seven LED lights. Nine video cameras. Able to withstand ocean depths of over 6 kilometers (4 miles) and pressures almost 600 times that at sea level. These impressively large numbers describe just a few features of the deep-ocean exploration remotely operated vehicles (ROV) Deep Discoverer (D2) and Seirios, as well as untethered autonomous platforms like Nereid Under Ice (NUI). Both D2 and Seirios are deployed from NOAA Ship Okeanos Explorer.
OYLA #21, August 2022
By Melissa Ryan & Karl McLetchie, Global Foundation for Ocean Exploration, and Philip Hoffman, NOAA Ocean Exploration
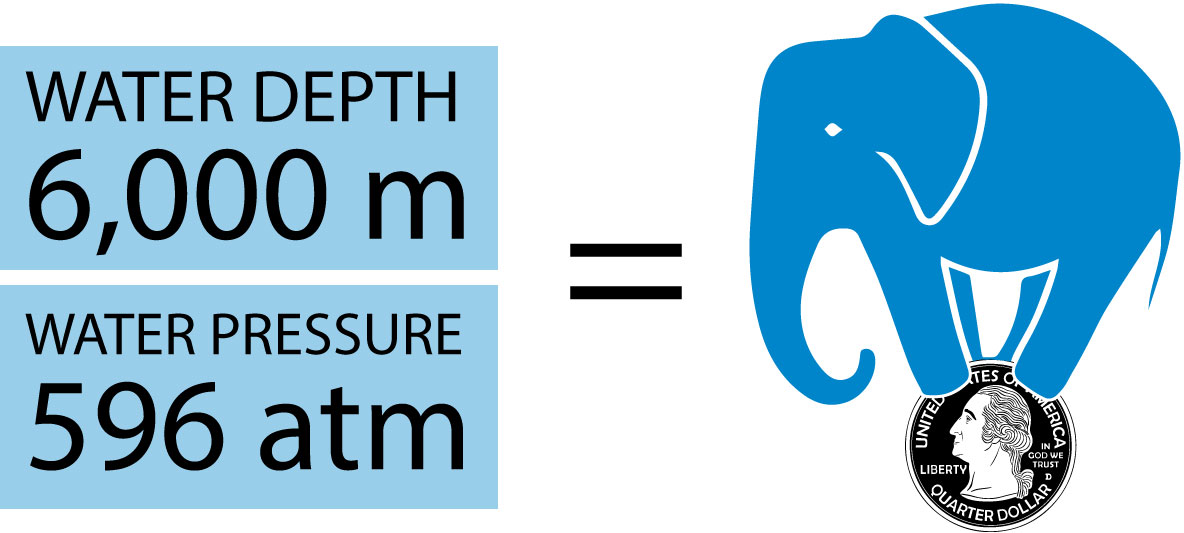
Pressure
In saltwater at depths of 6,000 meters (3.7 miles), the water pressure reaches 596 atm ("atm" is a measure of pressure that stands for "atmosphere"). That is equivalent to the weight of an elephant sitting on a quarter! Most electronics such as cameras, lights, and computers need to operate in one atmosphere of air, so they must be enclosed in an air-filled housing that will not collapse under such pressures. Engineers design these housings on a computer, using finite element analysis (FEA) to simulate the stresses in the material due to external pressure. The housing is then machined, assembled, and pressure tested in a laboratory before being used in the ocean.

Temperature
The average temperature of the deep ocean below 200 meters (660 feet) is about 4°C (39°F). A vehicle diving from the deck of a ship operating in the tropics down to these depths sees a huge temperature swing. Dissimilar materials like metal and plastic change size at different rates as the temperature falls, which may cause issues. For example, a plastic bearing on a metal shaft could shrink onto the shaft and seize up. Even after careful design, all mechanisms with moving parts must be tested at depth to ensure that they work properly.
Darkness
There is very little natural light below 200 meters (660 feet) in the ocean, and below 1,000 meters (3,280 feet), there is no sunlight at all. Underwater vehicles need lots of light for their cameras to see in the ocean. They also need to position their light sources far away to prevent the light from reflecting off of tiny organic particles, called marine snow, and blinding the cameras. (Think of fog lights on a car.)
The lack of light also means that robotic underwater explorers need other ways to "see" the ocean around them. They may use a variety of sound wave generators — called sonar — to map the seabed beneath them, to "listen" for the presence of sea creatures, and to determine their position. Some carry laser line scanners to build three-dimensional (3D) pictures of the things they encounter, such as shipwrecks. All the while these robots are storing the data they collect, readying it for transmission to humans.
Communication
Radio waves do not travel very far through water. Underwater robot platforms like AUVs can use acoustic communication to determine where they are and to tell their ship how they are doing. However, while that sound does travel long distances (up to 1 kilometer or 0.6 miles), it is still generally too slow to transmit video signals from the platform to a ship or to shore. To get around this issue, AUVs are programmed ahead of time, and their onboard computer guides them through their missions. Once a mission is complete, they surface and are either retrieved by a ship to offload their data or linked to a satellite to send their data to shore.
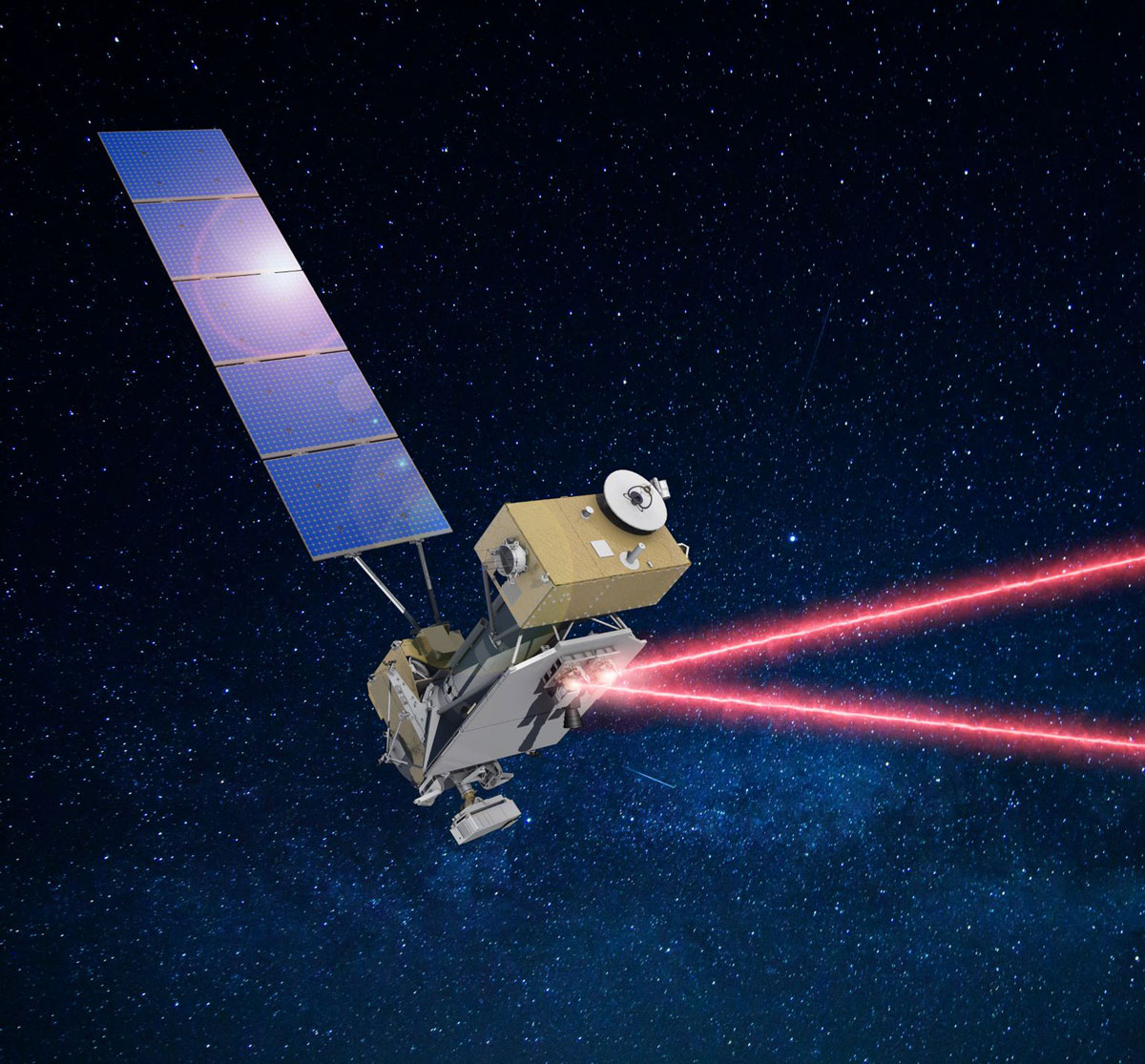
ROVs constantly communicate with their ship through a long fiber optic cable connecting the ship to the vehicle. Currently, the majority of deep ocean ROVs do not go deeper than 6,000 meters (3.7 miles). Cable design and other factors make greater depths more difficult and expensive to achieve. To go deeper, the next generation of engineers will need to develop new cable technology or high-speed, long-range wireless methods to communicate underwater. Some engineers are looking to NASA, the National Aeronautics and Space Administration, to solve this problem. The space agency is using lasers to send and receive signals through Earth’s atmosphere with space probes moving away from Earth.
Corrosion

Saltwater is an electrical conductor and accelerates the corrosion of metals immersed in it. Even for vehicles that are only used for a few hours a day and then rinsed with fresh water, corrosion can cause failures in metal frames and pressure housings. In the image you can see the galvanic scale that engineers use to choose materials for underwater vehicles. Gold is very cathodic, or safe from corrosion, but it is not very strong and is very expensive! Titanium is a great alternative that is lightweight, strong, and affordable (at least compared to gold). Aluminum is strong and lightweight, but it is on the anodic end of the scale, so it corrodes easily. Zinc "sacrificial anodes" can be bolted to an aluminum part as they will protect the aluminum by corroding first.
The Global Foundation for Ocean Exploration (GFOE) built and operates Deep Discoverer (D2) — one of the most capable science-class ROVs in the world. It is designed to overcome all of the challenges described above, and it reliably dives to 6,000 meters (3.7 miles) deep. What does it do once it’s down there? It collects video, physical samples, and data for scientists all around the world.
Video
D2 uses its 27 LED lights and high-definition cameras to survey the seafloor and zoom in on tiny organisms, bringing viewers closer than ever to the fascinating creatures and geology of the deep sea.





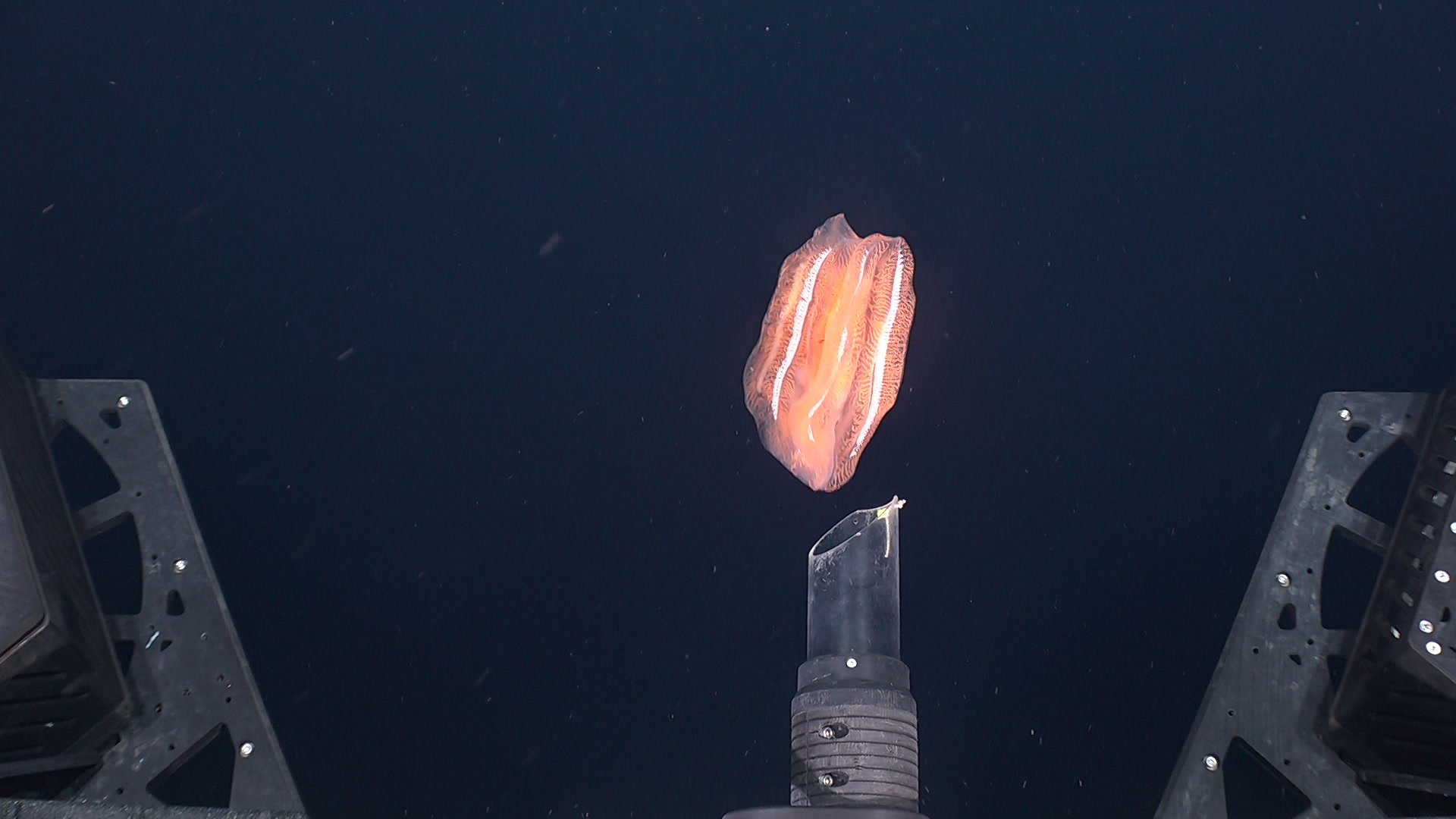
Suction Sampler
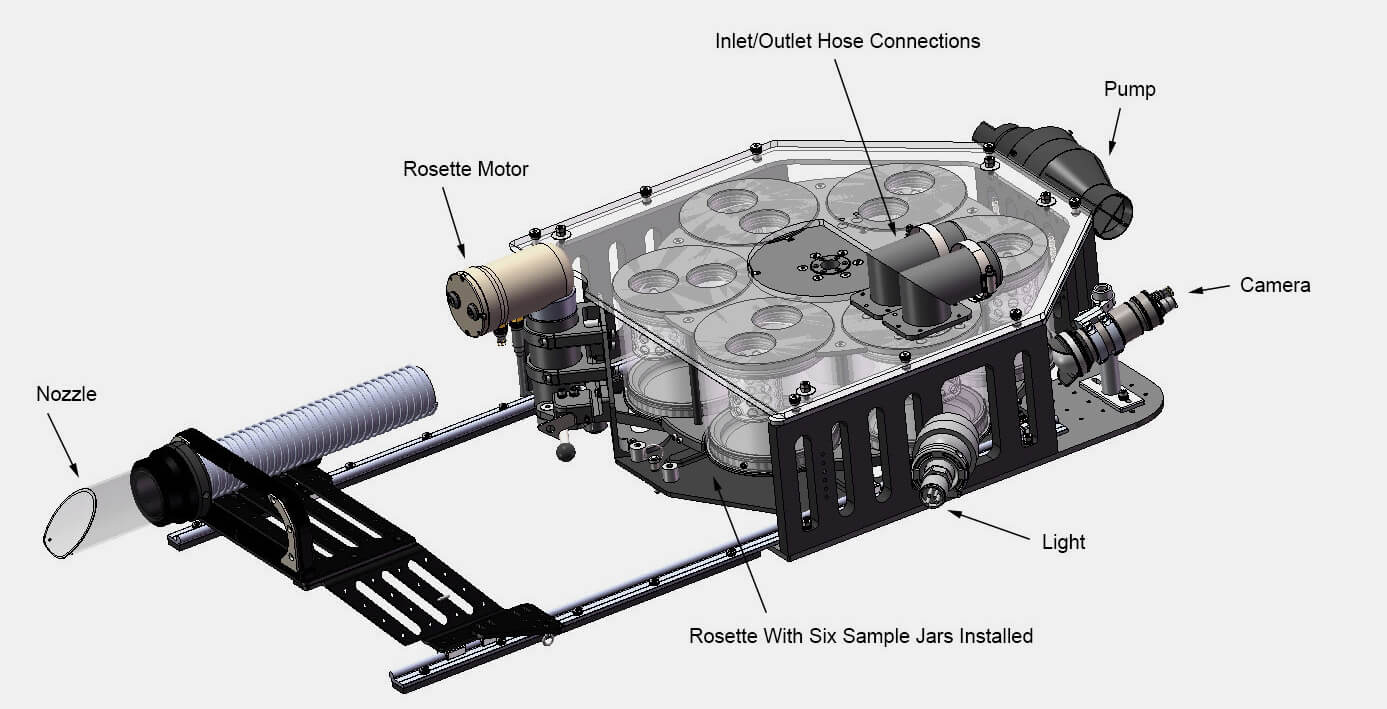
For samples that are too delicate or slippery to pick up with the manipulator jaws, GFOE added a suction sampler — think underwater vacuum cleaner — to collect and store samples. Instead of one clear canister like in your vacuum at home, it has six clear canisters to store individual samples. The manipulator can grab the nozzle and move it to any organism in range. For swimming organisms, like jellyfish or ctenophores, D2 can actually drive the nozzle directly to the organism.
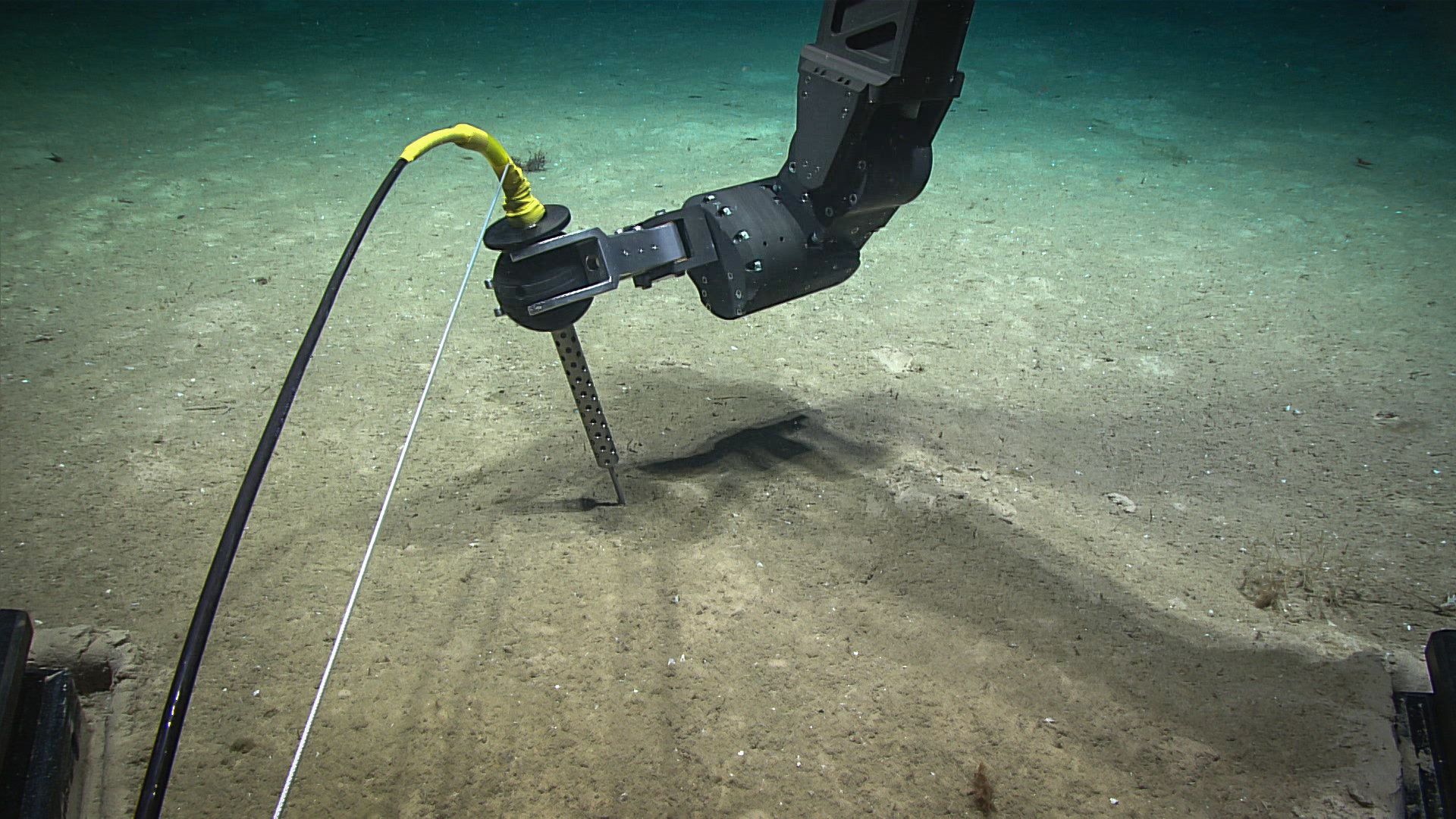
Manipulator Arm
The key tool that enables the ROV system to take samples from the seafloor is its manipulator arm. D2 uses a seven-function hydraulic manipulator arm that has position and force-feedback on every joint. Force-feedback allows the arm’s operators to sense the external forces acting on the arm. This increases pilot awareness and sensitivity and makes the manipulator arm extremely capable and dexterous for specimen collecting.
Coral Cutters
To carefully snip off a small branch of a coral or sponge rather than collect or damage the entire organism, the manipulator jaws are outfitted with scissor blades at their base.
Temperature Probe
Another tool that the manipulator arm can grab is a temperature probe. This is a long, titanium rod for probing into hydrothermal vents to measure the temperature of fluid bubbling up, which can be around 400°C (750°F).
Piloting From Shore
D2 was recently piloted from shore, an important step away from the idea that an exploration mission’s engineers must leave home for weeks or months at a time to work from ships. The biggest challenge to overcome was the delay between the pilot’s joystick command and the robot’s response. A robot may be thousands of miles away from its pilot and thousands of meters underwater, and the signal between them needs to travel more than 70,000 kilometers (44,000 miles) to a satellite and back. Imagine playing a video game where your character takes 10 seconds to respond to every joystick command! GFOE reduced that lag to just 1.25 seconds—a delay that was barely noticeable while piloting.
Seirios
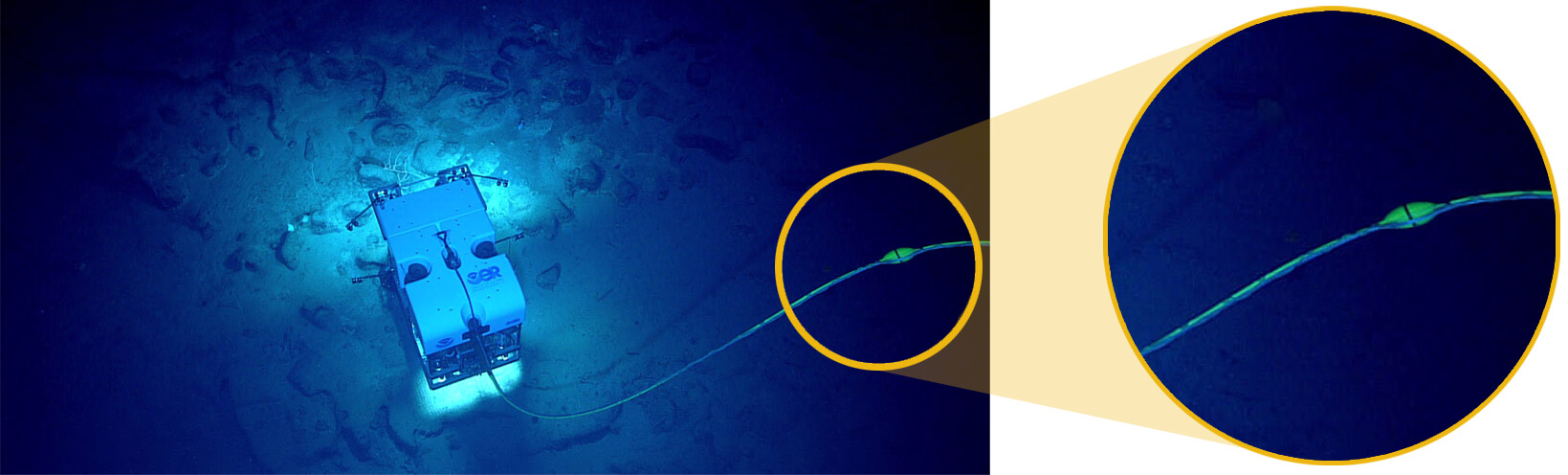
Referred to in the industry as a "camera sled", Seirios, named for the brightest star in the sky, is directly tethered to NOAA Ship Okeanos Explorer by a six-mile-long steel cable. It illuminates D2 from above, and through its cameras, provides ROV pilots with a wide-angle view of the bottom. It also absorbs the heaving, up-and-down motions of the ship at the surface. This allows D2 to safely travel over sometimes difficult terrain miles below. Seirios is equipped with multiple types of cameras that provide pilots with situational awareness while they explore the darkest depths of the ocean. For example, if an ROV is diving near a deep-sea vent, pilots need to see how close they are to the superheated water to prevent the ROV from melting.
Setup between NOAA Ship Okeanos Explorer and Seirios. The yellow tether coming out of Seirios connects to D2, which is below Seirios, exploring on the seafloor
Uncrewed Maritime Systems
NOAA Ocean Exploration partners with many university researchers, other federal agency programs, and private companies in the uncrewed maritime systems industry to deploy a variety of AUVs, buoyancy gliders, and autonomous surface vessels (ASVs) to help us collect more types of ocean data. By helping these experts get their vehicles to sea, we learn both about how the vehicles work—and whether we benefit from using these vehicles and teams permanently—as well as more about the ocean around us. These autonomous platforms carry some of the same instruments as their ROV cousins—such as temperature probes, depth recorders (which measure pressure and then convert to depth electronically), and salinity meters. AUVs and buoyancy gliders also carry a variety of other ocean instruments to conduct their science missions.
Acoustic Doppler Current Profiler (ADCP)
ADCPs use sound waves to measure the speed of water movement. They do this by sending very high-pitched pings into the water and then recording changes in the sound frequency when the sound returns to the instrument. By mounting ADCPs on slow-moving buoyancy gliders, which move up and down through the water by changing their internal buoyancy, scientists can build maps of ocean currents at different depths.
Mapping Sonar
Just as AUVs can map ocean currents using sound, they can map the ocean floor using different sound-producing sonars. AUVs can carry both side-scan sonar and multibeam sonar that work in the same way that ship-mounted sonars work, but they can take the sonar closer to the seafloor. This allows the AUV to create more detailed maps of the seafloor and its characteristics, called bathymetry, as well as to construct 3D images of objects like shipwrecks that the AUV encounters.
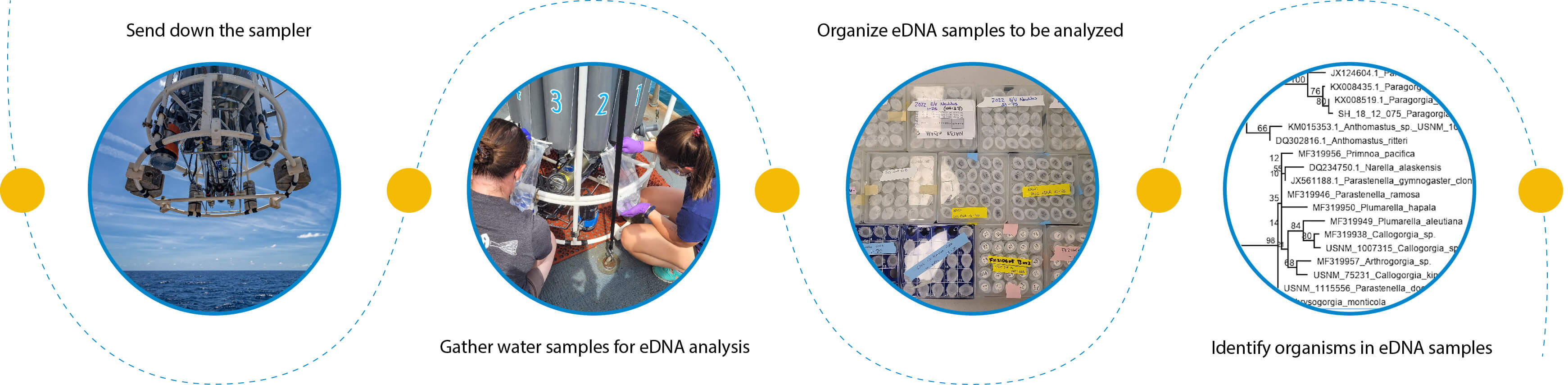
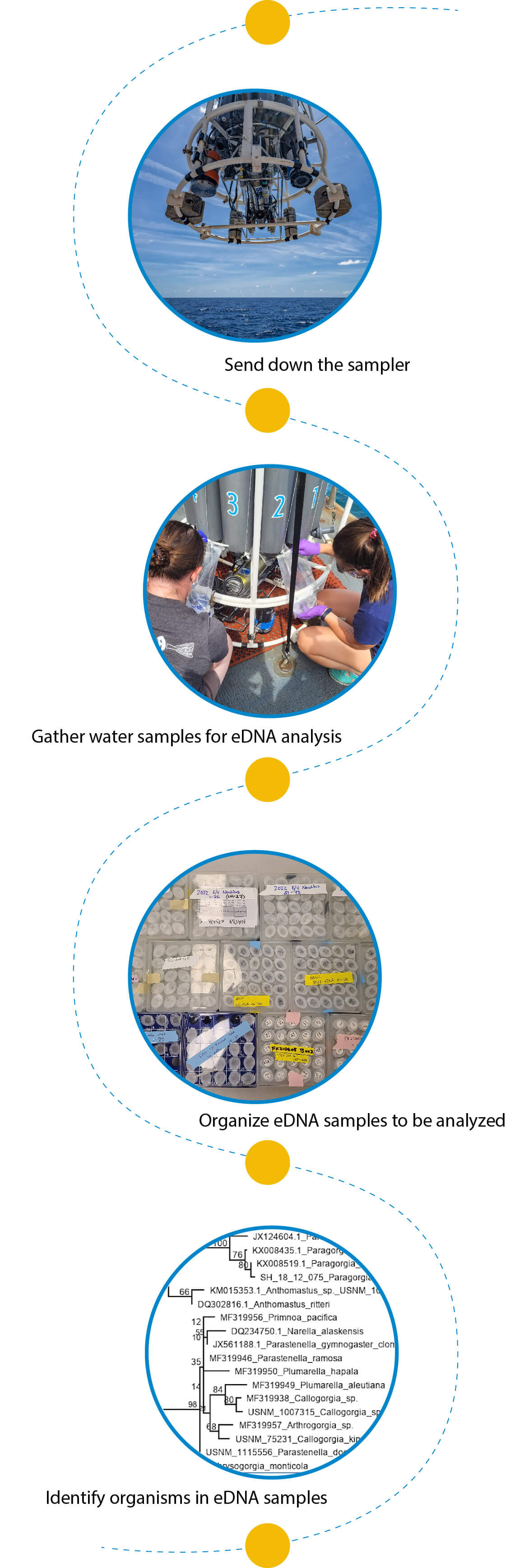
Environmental DNA (eDNA)
Because AUVs can go to great depths and either stay in one location or move around untethered, they are ideal for sampling environmental DNA (eDNA). eDNA is the genetic material that organisms leave behind in the water column. Just like a crime scene investigator can identify a perpetrator from the DNA and fingerprints left behind, marine animal species can be identified by the invisible signs of their presence constantly left in their environment. AUVs typically sample eDNA by pumping sea water through filters that are then preserved and analyzed in a lab where they can be compared to known samples of DNA stored around the world.
Our ocean is a fascinating place. It holds clues about past cultures and civilizations, provides rich sources for new medicines and treatments, and is home to millions of undiscovered species. Every day ocean scientists around the world seek to unlock its secrets. By deploying advanced technology like ROVs and AUVs, ocean scientists expand our knowledge of the ocean, which then unlocks even more questions to explore. The field includes engineers of different disciplines (mechanical, electrical, and software) and other experts that may surprise you, such as filmmakers whose work allows others to see ocean exploration in action. The sense of wonder and adventure that drives ocean science is embedded in our at-sea robots, and we can’t wait to see what future explorers do with them and the generations of ocean technology to come.