














Team members prepare to launch the laser line scanner (LLS) tow vehicle at night. Surveying operations run 24 hrs a day to take full advantage of the time aboard. Click image for larger view and image credit.

This image clearly shows a starfish, despite the "noise" in the data that appears as horizontal lines. Post-processing may remove the striping and make other sea-floor details visible. Image courtesy of Operation Laser Line 2006.
Mission Summary
November 8 - 13, 2006
John Rooney
Chief Scientist — Operation Laser Line 2006
Joint Institute for Marine and Atmospheric Research
The NOAA research vessel (R/V) Hi’ialakai got underway from Honolulu Harbor on November 11, 2006, for a six-day research cruise, funded by the NOAA Office of Exploration. The purpose of the cruise was to test laser line scanning technology in its ability to address questions related to the management of coral reef ecosystems. Detailed maps of benthic (sea bottom) habitats are tools necessary for this type of management, including a spatial component of coral reefs and the organisms that live there. Multibeam echosounders can be used to generate high-resolution maps of sea-floor bathymetry and backscatter imagery (which provides additional information about the composition of the sea floor). However, the identification of organisms living on or near the sea floor requires video or still cameras, which are very limited as to how much of the sea floor they can image, due to the limited range of visibility underwater. Laser line scanners can reduce this problem by using laser light, often in blue-green wavelengths, which penetrate through water further than do other colors of visible light.
For this cruise, the laser line scan (LLS) system was tested in the waters off Maui at depths between 60 and 300 m. The system used was a Northrop-Grumman SM-2000, which was mounted on an eight-ft long Focus tow vehicle. The Focus is a remotely operated tow vehicle (ROTV), which looks somewhat like a box kite. On some of the aluminum struts joining the four cylinders together are movable vanes which enable the vehicle operator to steer the sled up, down, and from side to side. This fine-scale control is essential for following pipelines on the sea floor and other precision surveying for which the system is used.
We were able to collect imagery of the sea floor and a number of organisms, including gorgonians, fish, algae, corals, and starfish. We also got a clear picture of the composition of the sea floor, i.e., whether it was rock, sand, rubble, etc. In many instances, we were able to get good insights on the texture of the bottom, e.g., the frequency and size of the holes in the sea floor, which have been shown to have significant influences in the distribution of fish and crustaceans living on or near the sea floor. On the down side, we experienced a lot of problems with electronic "noise" in the system, which showed up on the real-time imagery display as horizontal gaps and stripes in the data. After being in the water for several hours, the laser instrument and towfish were brought back aboard. Subsequent cleaning and reseating of connections helped to reduce the problems but did not eliminate them entirely, and organisms were visible but not very clear in the real-time imagery. However, Roger Davis of the Hawaii Mapping Research Group processed a bit of the LLS data we collected and the resulting imagery was much clearer and showed a lot of detail. We are optimistic that the post-processing of all the imagery will enable us to see significantly more detail.

This image shows a fish swimming above a mostly smooth, rocky sea floor. Image courtesy of Operation Laser Line 2006.
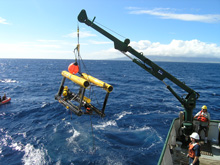
The LLS is hoisted onto the deck of the research vessel Kaimikai-o-Kanaloa. Click image for larger view and image credit.
At 8:30 am on Friday, November 10, we were heading southwest toward another survey line. As we came up on an underwater ledge the operator began to fly the towfish upward, but the bathymetry rose faster and the Focus vehicle struck the ledge and broke free of the cable. We asked the bridge to return to the site and look for the towfish to float to the surface, as it was designed to do. The bridge soon reported that they had visual contact with objects floating on the surface, including a corner of the tow vehicle. Team members launched a small boat, but all they found were several pieces of foam from the vehicle.
Apparently, the sled struck the ledge on one corner and tumbled, which precluded a weak link in the cable from releasing as it is designed to do in just this sort of situation. As a result, the electronics bottle the cable fed into was pulled out of the sled. The combination of striking the ledge and having the electronics bottle pulled out made it possible for some of the foam blocks on the sled to work loose from the vehicle, causing it to sink to the bottom in 570 ft of water. We conducted a detailed survey of the area in the hopes that a recovery operation might be possible. Dr. Chris Kelley of the Hawaii Undersea Research Laboratory (HURL) made a phone call and learned that by happy coincidence, HURL had submersible dives scheduled for the area the following week and would be able to spend a day looking for the Focus vehicle and the instruments on it.
After dropping off some of the scientists at a nearby harbor to fly home, the rest of us headed towards the island of Hawaii to take advantage of the remaining ship time to complete some multibeam surveying. We spent almost two full days there and managed to survey over two of the epicenters of an earthquake that struck the islands on October 15 of this year, knocking out electrical power for most of the state. We also surveyed essential fish habitat and nearshore areas along 35 mi of shoreline and filled other gaps in the existing multibeam coverage for the island. Early in the morning of November 13, we headed back to Oahu and tied up in Honolulu Harbor at 7 pm.
On Monday, November 20, we learned that HURL had successfully located and salvaged the Focus vehicle and all the instruments on it. The vehicle itself may or may not be repairable, but with the instruments in hand, the LLS system can be rebuilt.
Although the cruise certainly did not go as planned, we were able to come home with enough laser data to be able to provide at least a limited evaluation of its effectiveness in coral reef ecosystems. We also were able to make a valuable contribution to efforts to map all the nearshore waters of the Main Hawaiian Islands. Although a more definitive answer will have to wait until the post-processing is completed, it does appear that laser systems are potentially useful tools for providing optical validation of acoustically derived sea-floor maps.
After the crash, I asked the head of the survey team that owns and operates the LLS system if he could think of any lessons to be learned from this experience. He shrugged and said, “Don’t tow expensive equipment near the sea floor and expect to get it back.” This is a lesson that has proven true time and time again, but instruments providing optical data about the sea floor must be operated close to the bottom. The take-home lesson here may be that LLS instruments can be very useful, but should be developed to be able to operate independently and be small enough to be mounted on autonomous underwater vehicles (AUVs) or small submersible.
Sign up for the Ocean Explorer E-mail Update List.