













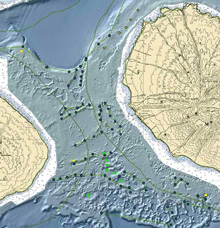
Figure 1. Planned laser line scan (LLS) survey sites in the Au'au Channel, off northwest Maui. Click image for larger view and image credit.
High Hopes End in Disappointment
November 11, 2006
John Rooney
Chief Scientist — Operation Laser Line 2006
Joint Institute for Marine and Atmospheric Research
As the clock rolled from Thursday, November 9, to Friday, I walked into the lab to begin my next midnight-to-noon watch. Walking down the passageway towards the lab, I could tell from the cluster of people intently watching the screen that the laser line scanner was finally collecting good data. The mood was almost jubilant. After a lot of effort to prepare for the cruise, a tough mobilization, and a frustrating day of collecting imagery that had a lot more glitches and problems than good views of the sea floor, we were finally getting what we came for. We were getting a nice picture of the sea floor and we could clearly see rocks, sand, fish, different types of coral, occasional starfish, etc. These were pretty exciting results, and we had all kinds of conversations about what species we might be seeing, and what we expected to find in other areas.
We continued surveying off the northwestern tip of Maui and then headed east, working up a gentle embankment onto a shelf at a depth of about 65 m (215 ft). From there we headed several miles south. After the excitement of the northern site, one of the scientists described this stretch of sea floor as “epically boring and tedious,” but no one really minded. We knew that shortly we’d reach an underwater wall that had lots of patches of hard coral reef — and luxuriant stands of black coral.
Meanwhile, the flat sea floor gave us a chance to improve the way in which we’d actually direct where the ship would steer. Up north, we’d given the ship a series of straight parallel lines to follow. A monitor was set up for the ship’s helmsman to see; it had an icon showing the position of the ship and the direction it was facing, and the lines it needed to follow. For most of the rest of the surveying we wanted to do, the ship would have to follow the tops of underwater ridges and ledges that curved and twisted, as seen in figure 1. Figure 1 is a map showing a hill-shaded view of the surface of the sea floor in the Au' au Channel. The tops of ridges in the middle of the channel are at about 200 ft depth.
The survey navigator, who runs the watch for the LLS operators, and I talked over how we could best direct the ship to follow the complex underwater topography. We gave him a digital version of a map (similar to the one shown in figure 1) to give him an accurate and detailed information about the sea-floor's shape, which he used to direct the ship’s course.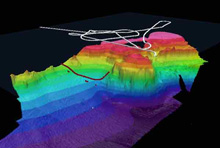
Figure 2. This three-dimensional bathymetry plot of the LLS accident site shows the research vessel Hi'ialakai's search tracks and the last known LLS position. Click image for larger view and image credit.
As we approached the edge of the wall we would soon be surveying along, the tow vehicle the laser line scanner was mounted on dipped down, following the sea floor into a depression before beginning to rise up again. The sled operator began to bring the sled up as the survey operator warned him of the approaching rise. In a matter of seconds, however, the sled operator said the he thought they’d struck the sea floor. That was confirmed a few minutes later when the survey navigator checked the tension on the tow cable and could tell that the towfish was no longer on it. We started a visual search or the area, knowing that the tow cable was designed to pull free in the event of a ground strike, leaving the towfish free to float to the surface. We observed a couple objects floating on the surface, so a small boat was launched with the expectation that it would tow the sled to the ship. But all the crew members found were a few pieces of syntactic foam from the sled that was designed to give it the necessary flotation to bring it back to the surface. After a few minutes, the operator for the ultra-short baseline navigation system (USBL) on the sled reported that the transponder on the sled was "pinging." First it was reporting the sled’s position on the surface, and later, on the sea floor. We surveyed over the top of that location with both the USBL to get the best possible location of the sled. We also conducted a small survey with the shipboard multibeam echosounders to generate a high-resolution map of the sea floor in that area, to assist possible salvage efforts.
Now we’re conducting additional multibeam surveying off the island of Hawaii, over the top of a couple of epicenters from the 6.7 and smaller earthquakes that struck the island a few weeks ago. We’re also surveying more of the essential fish habitat for commercially and recreationally harvested groundfish. Both of these are useful projects. It is very hard, however, not to feel sick at heart over the fate of the LLS survey. That was the only commercially available LLS instrument in the world. It may still be recovered and restored to service, but for now it is gone. The company that owns and operates it will incur a significant expense for any salvage and repair efforts. They’ll also lose income from not having the instrument available. Potential customers will likewise be affected. After Hurricane Katrina, the LLS was used extensively in the Gulf of Mexico to survey oil pipelines and other infrastructure. For now at least, that option is no longer available.
On my own part, I had been looking forward to these data for a long time and had high hopes that by using the LLS we would be able to find and map stony and black coral reefs at depths between 50 and 100 m (approximately 160 to 330 ft). We submitted proposals for this project for three yrs and had numerous meetings and conversations with representatives of various resource management agencies with jurisdiction over the areas where we were surveying. I spent most of the last two months preparing for the cruise. Although we did collect useful data, it was only a fraction of what I expected us to bring home.
I asked the survey lead from the company that owns the LLS his perspective on what lessons might be learned from this experience. He shrugged and said, “Don’t fly expensive equipment close to the sea floor.” That is a lesson that has been learned again and again by ocean scientists. Unfortunately, to manage coral reef ecosystems effectively, we need to know where corals and other organisms live. With any technology available today, that requires getting close to the sea floor. Ironically enough, we had hoped that the ability of the LLS to be flown higher above the sea floor than conventional cameras would help protect us from these sorts of problems. I still think that LLS technology may be the tool of choice. However, for the rugged terrain typical of many coral reef ecosystems, a different means of deploying it is required. An autonomous underwater vehicle (AUV) equipped with an LLS system would probably be the most cost-effective way to collect the required data.
Sign up for the Ocean Explorer E-mail Update List.