













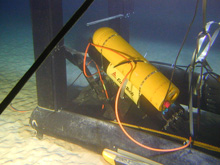
Figure 1. The laser line scanner (LLS) is on the sea floor off Maui, showing the position of the side scan sonar system. Click image for larger view and image credit.
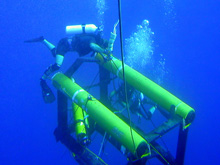
Figure 2. Scuba divers from Hawaii Undersea Research Laboratories attach the "bridle" to the LLS at the surface. Click image for larger view and image credit.
Recovery of the Laser Line Scanner
November 20, 2006
Christopher Kelley
Hawaii Undersea Research Laboratories
Today, colleagues from the Hawaii Undersea Research Laboratory (HURL) recovered the laser line scanner (LLS).
The day the laser line scanner was lost — November 10 — I put Seth Mogk, the LLS supervisor, in contact with HURL’s operation director and chief submersible pilot Terry Kerby to discuss a possible salvage operation using the Pisces IV submersible. HURL operates two, 2,000-m Pisces submersibles as well as a 1,000-m remotely operated vehicle (ROV) called the RCV-150. Being HURL’s program biologist, I knew that the HURL research vessel (R/V) Kaimikai-o-Kanaloa was planning to conduct dive operations in the Au'au Channel off Maui on Sunday, November 19.
Following that conversation, Scientific Applications International Corporation (SAIC) contracted HURL to make the attempt. On Sunday night, November 19, Seth and I flew over to Maui and transferred onto the R/ V Kaimikai-o-Kanaloa (also called the KOK) at Lahaina. At about 7 pm, we conducted an ROV dive on the last known location of the LLS.
The purpose of the dive was three-fold: 1) to determine whether the KOK submersible tracking system could be configured to send a signal and receive a response from the LLS emergency beacon, 2) to determine whether the LLS was still in the same position and whether it could be located with the ROV forward-looking sonar, and 3) to determine the condition of the LLS for planning the salvage.
The ROV dive accomplished all three objectives. The ROV operators, Dan Greeson and Pete Townsend, set up the tracking system according to the settings provided by Seth and were indeed able to communicate with the beacon. As the ROV approached the LLS's last known position, the signal clearly got louder indicating that it would be possible for the submersible to track the signal the next morning. About 80 m from the position, a large oval target showed up on the ROV sonar. As we approached the target, the LLS suddenly appeared in the ROV camera.
The KOK does not have dynamic positioning and was therefore unable to keep stationary for more than 1 to 2 min. Fortunately, that was long enough for us to get a good look at it, and to our amazement, all of the LLS components were still there — including its side scan sonar system. Furthermore, it was only 20 m from its last position, which was obtained by the R/V Hi’ialakai a week earlier. Our job just became a lot easier since everything was somehow still together and all in one place!
Following the ROV dive, a meeting was held on the ship to finalize the salvage plan. After the meeting, HURL staff worked into the night, rigging lines, floats, lift bags, and the "bridle" to execute the plan.
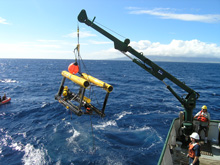
The LLS is hoisted onto the deck of the R/V Kaimikai-o-Kanaloa. Click image for larger view and image credit.
The next morning, all was ready. Seth, Terry, and I climbed into the Pisces IV around 8 am. This was Seth’s first experience in a submersible and he was clearly enjoying himself. At about 8:30 am, we landed on a sediment bottom a short distance from the LLS. The depth was 176 m. After Terry adjusted ballast and started the video and sonar systems, we headed toward its position. Just as with the ROV, it showed up as a strong oval target on sonar, which we easily tracked to and found less than 20 min into the dive.
We thoroughly inspected the LLS from all sides and Terry determined there was nothing he could do to secure the side scan sonar, which was lying loose in the lower left front corner (fig. 1). We could only hope it stayed with the vehicle on the ride up. Terry then pushed the LLS with the manipulator to determine how heavy it was in water. It moved immediately, indicating that we would have no weight problems while recovering it with the submersible.
Terry used a modified carabiner (a metal loop with a closure) to secure a line from the submersible to the LLS's upper left rear corner. We then left the bottom with the LLS dangling underneath us. At the surface, scuba divers met us and immediately dove down to secure the side scan sonar, which thankfully hadn’t fallen out. They attached a bridle to all four corners of the LLS, which was then connected to a surface buoy (fig. 2). The line from the sub was released and the LLS was then moved over and secured to the diver’s inflatable boat.
The KOK approached the boat, and the bridle was then hooked up to a crane, which then lifted the LLS on to the main deck of the ship (fig. 3). The ship came around and recovered the divers and the three of us in the sub. Since everything was finished in less than three hrs, we headed back to Honolulu and arrived in port that night.
Seth is not certain what will happen to the LLS now. It did sustain damage to the front left side and to the upper horizontal strut. The laser system itself — along with the beacon, the side scan sonar, and other electronic components — all look fine on the outside. However, they won’t know what their true condition is until they get everything back to San Diego and open everything up. We can only hope it survived in good shape and that we will one day see the system, fully operational, out in Hawaii again.
Sign up for the Ocean Explorer E-mail Update List.