

















ROV Operations in Thunder Bay

The Phantom S2 remotely operated vehicle (ROV) deployed in Lake Huron. Click image for larger view and image credit.
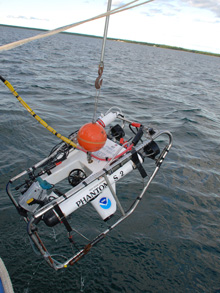
Recovery of the Phantom S2 ROV after a dive to the Isolated Sinkhole. Click image for larger view and image credit.
September 5, 2008
Devin A. Bonnie
ROV Operator
University of Connecticut
National Undersea Research Center
![]() Watch the Phantom remotely operated vehicle deploy for exploration of the Isolated Sinkhole. (Quicktime, 1.9 Mb.)
Watch the Phantom remotely operated vehicle deploy for exploration of the Isolated Sinkhole. (Quicktime, 1.9 Mb.)
Remotely operated underwater vehicles (ROVs) are unoccupied, maneuverable, and tethered underwater robots. These platforms usually contain a video camera, lights, thrusters, and sometimes water sampling systems or manipulators (robotic claws). The vehicle is linked to the ship by its tether (umbilical cable), which supplies power to the ROV and obtains data from sensors. On board the ship, the tether is connected to the ROV's control system.
Using joysticks, camera controls, and a video monitor, ROV pilots "fly" the vehicle to desired locations, with the operator acting as the machine's eyes. The video signal is recorded as well as the vehicle's heading, depth, and geographic position (latitude and longitude).
The National Undersea Research Center at the University of Connecticut (NURC – UConn) provided the ROV for this mission — a Phantom S2, made available as part of a NURC-UConn and Norwalk Maritime Aquarium partnership. This ROV was an ideal choice because the S2's frame can support a manipulator, tracking transponder, and a Sea-Bird data acquisition system, which measures water temperature, conductivity, oxygen levels, pH, and its depth. My interest is in how the water discharged from the underwater vents interacts with the ambient water masses in Lake Huron throughout the year.
We need the Sea-Bird for both chemical mapping in the sinkhole and as a sampling indicator for the scientists. A 170-meter (558-foot) tube, connected to the ROV and a pump on board the ship, obtained the groundwater samples from underwater sinkholes. This vehicle could also dive to the depth needed (about 93 m/305 ft) and had capable thruster power for the necessary movement.

Devin Bonnie controls the Phantom S2 ROV from the research vessel Laurentian. Click image for larger view and image credit.

A close look at the Phantom S2 just prior to deployment. Click image for larger view and image credit.
Deploying the Phantom S2 in the Isolated Sinkhole involved lowering the vehicle over the side (using the ship's crane), flying away from the ship, and diving to the lake floor. It is important to move away from the ship so as to avoid entangling the tether in anchor lines or the ship's propellers. The geographical positioning of the ROV was determined by an acoustic tracking program, with the transceiver located on board the ship and the transponder on the ROV's frame.
Having the real-time position of the S2 was beneficial in finding the sinkhole, labeling points of interest, and determining chemical mapping (using the Sea-Bird). The manipulator was important to our attempt at retrieving wood samples found in the sinkhole. Not only did the video camera serve as the operator's eyes for movement, it allowed the scientists to view aquatic life, ranging from fish to bacterial mats. Utilizing the tilt tray, these mats could be examined closely and their position can be referenced by the tracking system.
Without an ROV, this mission could not have been successful. An unmanned vehicle ensures personnel safety, allows different sampling variables, and provides a straightforward, working platform of operations. Changes in the weather or mission can be readily applied, which leads to a versatile data-collecting unit.
The Phantom S2 ROV paved the way on the lake floor, forging ahead in the name of science.
Sign up for the Ocean Explorer E-mail Update List.