
































Oscar Garcia, a PhD student at Texas A&M – Corpus Christi, puts the finishing touches on a float for one of the three time-lapse cameras on the Expedition to the Deep Slope 2007 cruise. Click image for larger view and image credit.

Oscar Garcia (left) and Ian McDonald carefully place one of the time-lapse cameras on the elevator. The cameras are too big to fit on the Jason remotely operated vehicle (ROV). Instead, they must be sent to the bottom using one of the Jason elevators. Once on bottom, Jason will retrieve the camera and "carry" it to the proper location for deployment. Click image for larger view and image credit.
Rotary Time-lapse Cameras: Part 1
June 19, 2007
Ian R. MacDonald
Texas A&M University – Corpus Christi
27° 25.00 N
88° 22.20 W
![]() We send the rotary time-lapse cameras to the bottom using Jason’s free-release elevator. (Quicktime, 1.8 Mb.)
We send the rotary time-lapse cameras to the bottom using Jason’s free-release elevator. (Quicktime, 1.8 Mb.)
Using the remotely operate vehicle (ROV) Jason, scientists and observers are able to operate on the bottom for much longer than is possible with most human-occupied submarines. But the time still comes when the dive ends, and we move on to the next site or take our data back to the lab. Life in chemosynthetic communities goes on, of course, and we have to wonder what happens outside of the brief snapshot in time when we were there.
For many years, I have been deploying a variety of time-lapse cameras at hydrocarbon seeps and hydrothermal vents to try to address this question. I use the data these systems generate to understand how the physical environments change over time: how seeps increase or decrease in activity and how animals behave when they are not disturbed by the bright lights and noise generated by submersibles. These are questions that are difficult or impossible to answer unless you have long-term continuous information.
The basic idea is to have a camera along with a source of light that takes a picture at a fixed interval. For this to work, you need a pressure housing for the camera and lights, and a large and robust battery to supply power. You also need assurances that you will be able to come back in the not-too-distant future to retrieve your camera, which you hope will be full of fascinating images.
As with any deep-sea operation there are many challenges in trying to make equipment work when you cannot be there to check on it — especially under the pressure hundreds or thousands of meters of water. Over the years I have had my share of disasters: housings that flooded, batteries that failed, and cameras that were out of focus. Even when everything works, you still are left with a single point of view. Looking at the pictures, you always wonder what was happening just outside the frame. On most deployments, I have had to leave the cameras out for about a year because the scheduling of ship operations rarely allows multiple cruises with a submersible in less than a year. Knowing you have a camera on the bottom and wondering if it is still working can be a source of worry in the time between cruises.
Two of Ian MacDonald's three time-lapse cameras are loaded on the elevator and ready for their initial deployment. The Jason ROV will locate the elevator once it reaches the sea floor, retrieve the cameras, and place them at locations specified by scientists in the control van on the ship. Click image for larger view and image credit.
For this project, I wanted to try and solve some of the more common deep-sea time-lapse camera problems with a new type of camera. I worked with an electrical engineer named Mark Roberts and a company called AquaPix (of which I am part owner). Together we developed a time-lapse camera that rotates between frames and uses an energy efficient strobe as a light source. The idea is to be able to view a 360° area around the camera. (No more wondering what was happening behind the camera!) To get around the problem of year-long deployments, I wanted a system that would let me recover the cameras without having to dive with a submersible.
Our solution has been to place the camera and light source inside a thick-walled (9 millimeter) glass tube. Using a glass tube as a pressure housing not only lets the camera aim in all directions, but it provides a significant cost saving over conventional titanium or aluminum housings. In adapting an off-the-shelf digital camera (Nikon CP5400) and creating a powerful custom strobe for light, our objective is to take high-resolution images with an affordable, energy-efficient system.
I deployed a prototype rotary camera during last year’s Alvin cruise, but was obliged to leave it out for an entire year because no submersible was available until we returned with Jason. Sadly, when we recovered it from our Green Canyon 852 site, the stainless steel endcap had developed a pin-hole and the unit was half full of water. Although I may be able to recover the data from the compact flash card, the camera and electronics were a total loss.
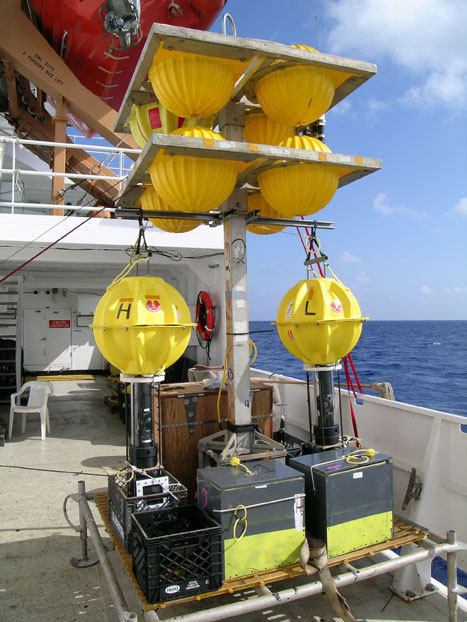
The new design dispenses with stainless steel in favor of an all-glass housing. More important, I have attached the camera to a compact recovery platform that will return to the surface when it receives an acoustic signal. This time I should be able to get my camera back in a couple of months. For power, I use two lead-acid gel cells deployed in an oil-compensated container. The battery container is filled with mineral oil and covered with a flexible membrane. The pressure of the seawater can press in on the oil until the batteries are at the same pressure as the surrounding seawater. The pressure does not hurt the batteries, while the oil protects them from seawater. Best of all, the battery packs can be made light enough to lift with a single float having about 45 pounds of buoyancy.
Check back later in the cruise to see how things go during the first series of deployments for the new camera design.