

















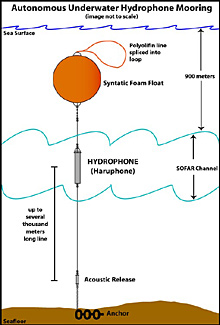
Diagram of the Autonomous Underwater Hydrophone (AUH) mooring. The schematic is not to scale, but does show the main mooring components and their locations in the water column. Click image for larger view.
AUHs Monitor Submarine Volcanoes and Gentle Giants of the Deep
February 22, 2003
Matt Fowler
Hydroacoustics
Oregon State University
![]() Watch an animation of the hydrophone in use. (mp4, 2.8 MB)
Watch an animation of the hydrophone in use. (mp4, 2.8 MB)
The NOAA Vents Program’s Autonomous Underwater Hydrophones (AUH) are very sensitive tools for monitoring undersea seismicity and marine mammal activity. It is hoped that the hydrophones deployed on this expedition will locate concentrations of seismic activity below the level currently detected by land-based seismometers. Of particular interest is the identification of active submarine volcanism. The year-long continuous monitoring of the submerged Mariana Arc/back-arc regions will hopefully target areas of unusual seismic activity that can be investigated with a submersible or remotely operated vehicle in future expeditions.
The benefits of NOAA’s AUH array are not restricted to undersea seismicity. Hydroacoustic monitoring of an area also provides valuable insight into the populations of marine mammals that inhabit the region for some or all of the year. It is very difficult to monitor whales in the deep blue sea, but the NOAA AUH array is constantly detecting and recording the calls of many species of whales. Often this monitoring is accomplished from tens to hundreds of kilometers away. This passive listening system is non-intrusive in the whale’s environment and does not disturb these gentle giants.

Deploying the hydrophone over the stern of the Thompson (from left to right): Phil Smith, Matt Fowler and Bill Martin.
The ocean has a unique layer called the SOFAR (SOund Fixing And Ranging) channel, which is a region of low sound velocity. This layer “traps” sound and allows it to be heard at extremely long distances. The AUH array must be moored in such a way that the instrument is located in this layer. This is not a simple task since the layer is at approximately 900 meters (0.6 miles) water depth, but the sea floor is at more than 4,000 meters (2.5 miles) depth. At the top of the hydrophone mooring is a 1 meter (37 in) spherical syntactic foam float, providing more than 230 kg (500 lbs) of flotation. The float is connected to a 50 meter (160 ft) line that attaches to the top of the hydrophone. From the hydrophone to the 365 kg (800 lb) anchor is a very long line. The length of the line is dependent on the water depth and the SOFAR channel depth. If the instrument is deployed in water 4,000 meters (2.5 miles) deep and the SOFAR channel is 900 m (.6 miles) deep, the line between the hydrophone and anchor is 3,100 m (1.9 mi) long. Since this is much too deep for divers to retrieve, an ingenious device known as an acoustic release is attached between the bottom of the mooring line and the anchor.

Deploying the hydrophone syntactic foam float over the stern of the Thompson (from left to right): Phil Smith, Matt Fowler and Bill Martin. Click image for larger view.
During the deployment period, the mooring is kept vertical in the water column by the float pulling against the anchor. When it is time to recover the hydrophone, a signal is sent from the ship to the acoustic release telling the device to release the anchor. Waiting for a confirmation that the acoustic release is on the way up is often a very tense time, because the failure of the release results in the loss of both the instrument/mooring and all the data recorded during the deployment period. After the anchor has been released, the float at the top lifts the entire mooring to the surface, where the waiting ship can then bring the entire 2-mile-long mooring aboard.
This is the first time that the AUH system has been deployed in the Marianas region. Two hydrophones have already been deployed in the area. The remaining three will be deployed on our transit back to Guam at the end of the cruise. We will have to wait until the system is retrieved to see the results of this exciting ocean seismicity and marine mammal monitoring experiment.