

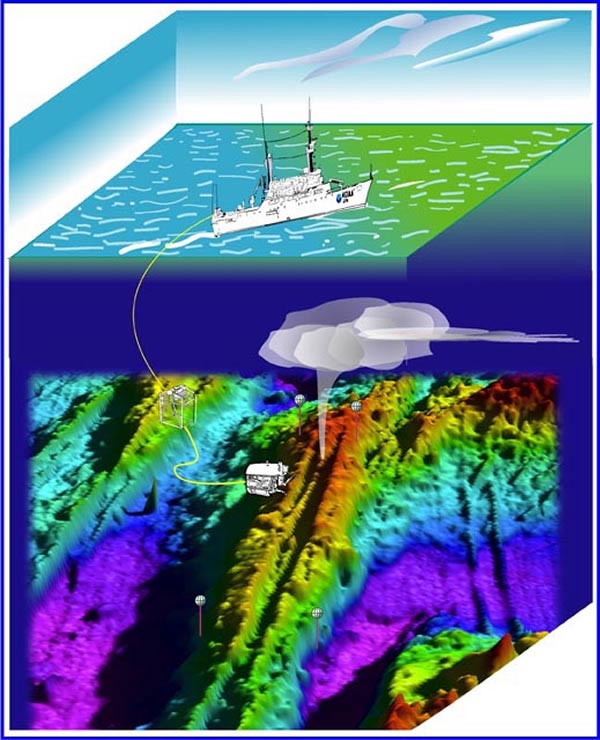
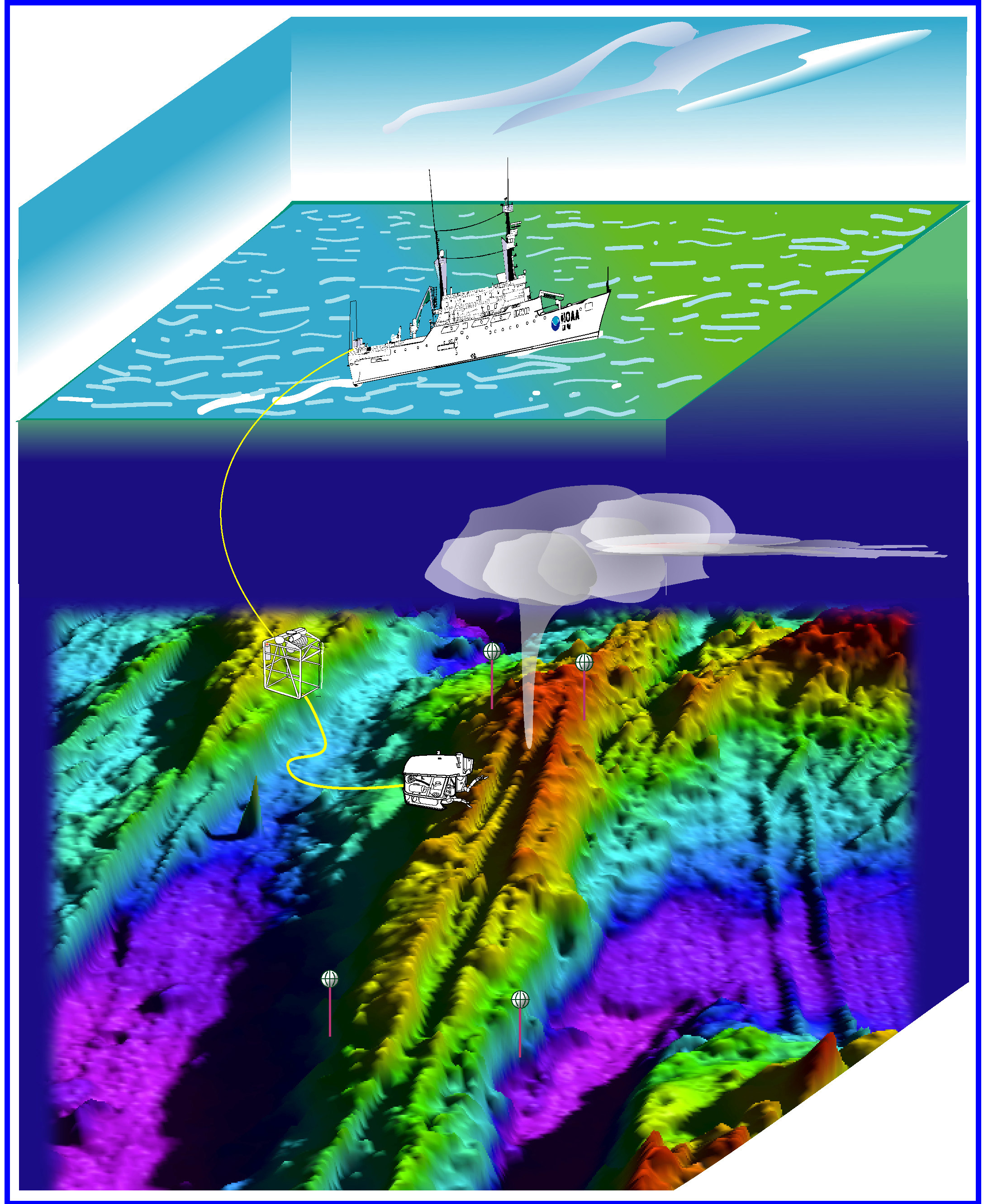
Phase 2: During Leg II of the expedition (July 23 to August 5), the ROPOS remotely operated vehicle will be used to explore vent sites and/or other interesting targets discovered during Leg I. The success of this depends upon the superior positioning capability of the R/V Thomas G. Thompson (TGT). The TGT is equipped with a specialized computer-controlled propulsion system that automatically responds to changes in position (calculated from the Global Positioning System satellites) caused by wind and currents to keep the vessel within about a 20-40 meter circle during these operations. The ROPOS is lowered in its “cage” (shown as open frame object below the vessel's stern) by a large-diameter fiber-optic cable to about 40 meters above the seafloor. ROPOS then leaves the cage and descends to the seafloor trailing a “tether”. The tether has its own winch in the cage. Once ROPOS clears the cage, it is isolated from the up and down surge of the ship (assuming that some slack remains in the tether). ROPOS is then free to explore, map and sample the seafloor within about a 100-150 meter diameter circle without the TGT moving. ROPOS can also drive along near the bottom as the TGT moves slowly (~0.5 knots) along in the same direction. Image courtesy of Submarine Ring of Fire 2002, NOAA/OER.
{kind=link}