
By Dave Lovalvo, ROV Operations Coordinator - NOAA Okeanos Explorer Program
Scientists and engineers exploring the deep ocean with a remotely operated vehicle (ROV) are now able to see a lot more of what they are doing and where they are going. NOAA’s innovative and newly designed camera sled Seirios illuminates the ROV from above, giving operators on board the support ship an expanded view of the ROV as well as enhancing visibility in the surrounding areas.
These broader perspectives promise to increase not only our understanding of how to investigate a remotely explored area, but also to literally shed light on a location’s features and inhabitants and to capture high-quality images to share with the world. The camera sled Seirios and the ROV, the Institute for Exploration’s (IFE) Little Herc, both carry the most advanced underwater high definition (HD) video cameras available today. Paired with the system’s 3,200-watt HMI lighting technology, these cameras capture the true colors experienced at depth.

The ROV team prepares Seirios for the next dive during an ROV shakedown cruise conducted off the coast of the Channel Islands, CA in April 2011. Image courtesy of NOAA Office of Ocean Exploration and Research. Download larger version (jpg, 1.5 MB).
The first explorers to benefit from Seirios are participants in the Galápagos Rift Expedition 2011 (GALREX 2011). During the Leg 1 of this Ocean Explorer mission, the exploration team aboard the NOAA ship Okeanos Explorer mapped the Galápagos Rift, searching for areas of active hydrothermal venting. Now on Leg 2, a team of scientists and engineers returns to investigate key locations up close with cutting-edge exploration technology: a tethered, two-body system that couples Seirios with Little Herc, a veteran ROV completely rebuilt from scratch. GALREX 2011 marks the maiden voyage for this combined exploration package.

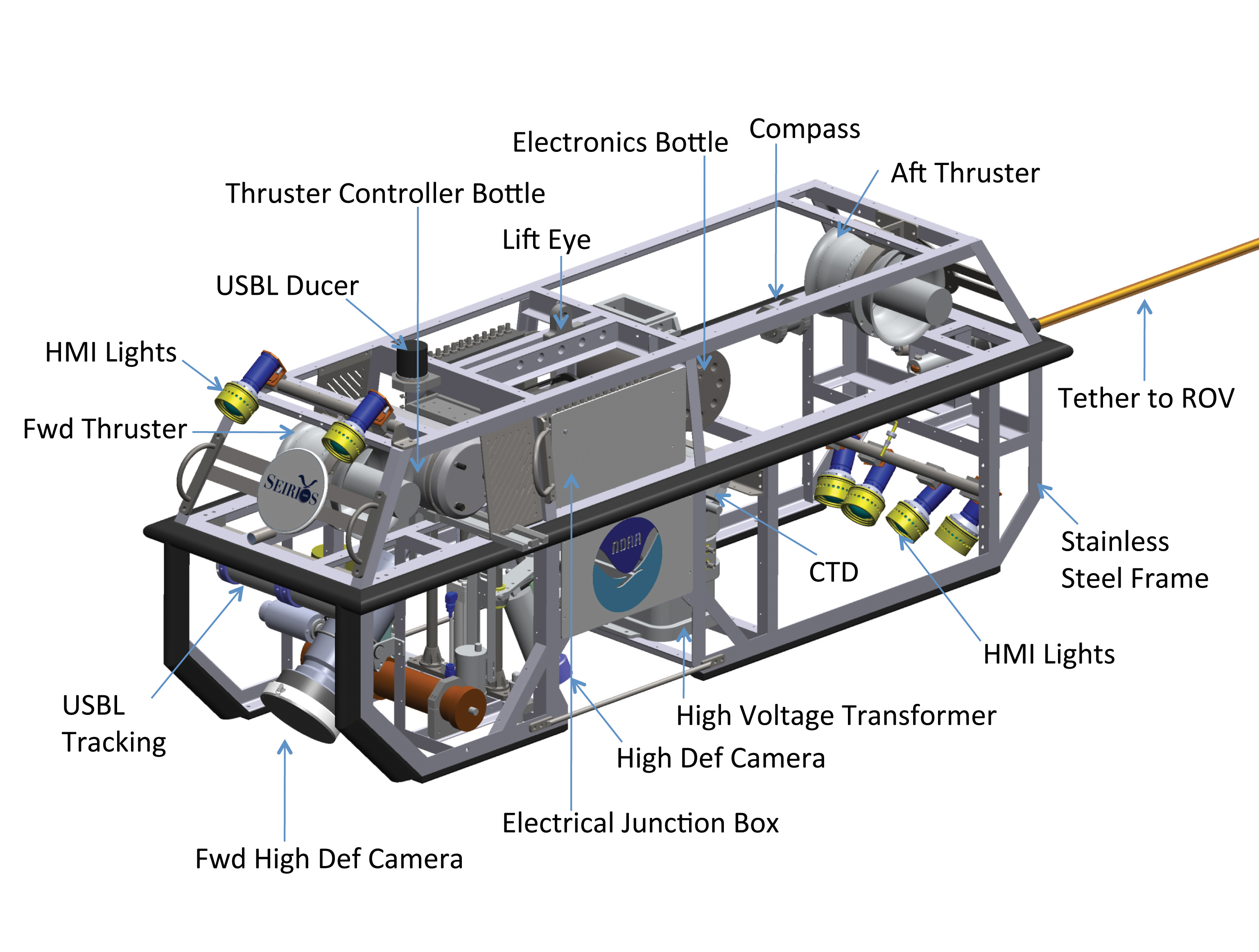
Seirios, a camera sled and sensor platform developed for the NOAA Ship Okeanos Explorer and integrated as a standalone or in tandem system with an ROV. Deployed for the first time during an ROV shakedown cruise off the coast of the Channel Islands, CA in April 2011 it brings significant tools to deep-sea exploration. Image courtesy of NOAA Office of Ocean Exploration and Research. Download larger version (jpg, 1.8 MB).

Seirios, a camera sled and sensor platform developed for the NOAA Ship Okeanos Explorer and integrated as a standalone or in tandem system with an ROV. Deployed for the first time during an ROV shakedown cruise off the coast of the Channel Islands, CA in April 2011 it brings significant tools to deep-sea exploration. Image courtesy of NOAA Office of Ocean Exploration and Research. Download larger version (jpg, 5.1 MB).

Seirios, a camera sled and sensor platform developed for the NOAA Ship Okeanos Explorer and integrated as a standalone or in tandem system with an ROV. Deployed for the first time during an ROV shakedown cruise off the coast of the Channel Islands, CA in April 2011 it brings significant tools to deep-sea exploration. Image courtesy of NOAA Office of Ocean Exploration and Research. Download larger version (jpg, 4.0 MB).

Seirios, a camera sled and sensor platform developed for the NOAA Ship Okeanos Explorer and integrated as a standalone or in tandem system with an ROV. Deployed for the first time during an ROV shakedown cruise off the coast of the Channel Islands, CA in April 2011 it brings significant tools to deep-sea exploration. Image courtesy of NOAA Office of Ocean Exploration and Research. Download larger version (jpg, 4.7 MB).

Seirios, a camera sled and sensor platform developed for the NOAA Ship Okeanos Explorer and integrated as a standalone or in tandem system with an ROV. Deployed for the first time during an ROV shakedown cruise off the coast of the Channel Islands, CA in April 2011 it brings significant tools to deep-sea exploration. Image courtesy of NOAA Office of Ocean Exploration and Research. Download larger version (jpg, 4.9 MB).

Seirios, a camera sled and sensor platform developed for the NOAA Ship Okeanos Explorer and integrated as a standalone or in tandem system with an ROV. Deployed for the first time during an ROV shakedown cruise off the coast of the Channel Islands, CA in April 2011 it brings significant tools to deep-sea exploration. Image courtesy of NOAA Office of Ocean Exploration and Research. Download larger version (jpg, 5.3 MB).

Seirios, a camera sled and sensor platform developed for the NOAA Ship Okeanos Explorer and integrated as a standalone or in tandem system with an ROV. Deployed for the first time during an ROV shakedown cruise off the coast of the Channel Islands, CA in April 2011 it brings significant tools to deep-sea exploration. Image courtesy of NOAA Office of Ocean Exploration and Research. Download larger version (jpg, 4.7 MB).

Seirios, a camera sled and sensor platform developed for the NOAA Ship Okeanos Explorer and integrated as a standalone or in tandem system with an ROV. Deployed for the first time during an ROV shakedown cruise off the coast of the Channel Islands, CA in April 2011 it brings significant tools to deep-sea exploration. Image courtesy of NOAA Office of Ocean Exploration and Research. Download larger version (jpg, 4.8 MB).

Seirios, a camera sled and sensor platform developed for the NOAA Ship Okeanos Explorer and integrated as a standalone or in tandem system with an ROV. Deployed for the first time during an ROV shakedown cruise off the coast of the Channel Islands, CA in April 2011 it brings significant tools to deep-sea exploration. Image courtesy of NOAA Office of Ocean Exploration and Research. Download larger version (jpg, 4.8 MB).

Seirios, a camera sled and sensor platform developed for the NOAA Ship Okeanos Explorer and integrated as a standalone or in tandem system with an ROV. Deployed for the first time during an ROV shakedown cruise off the coast of the Channel Islands, CA in April 2011 it brings significant tools to deep-sea exploration. Image courtesy of NOAA Office of Ocean Exploration and Research. Download larger version (jpg, 4.1 MB).

Seirios, a camera sled and sensor platform developed for the NOAA Ship Okeanos Explorer and integrated as a standalone or in tandem system with an ROV. Deployed for the first time during an ROV shakedown cruise off the coast of the Channel Islands, CA in April 2011 it brings significant tools to deep-sea exploration. Image courtesy of NOAA Office of Ocean Exploration and Research. Download larger version (jpg, 4.2 MB).

Seirios, a camera sled and sensor platform developed for the NOAA Ship Okeanos Explorer and integrated as a standalone or in tandem system with an ROV. Deployed for the first time during an ROV shakedown cruise off the coast of the Channel Islands, CA in April 2011 it brings significant tools to deep-sea exploration. Image courtesy of NOAA Office of Ocean Exploration and Research. Download larger version (jpg, 4.4 MB).
Seirios improves on the previous equipment in the following ways:
- it is able to carry more cameras, sensors, and lighting to increase the types, amount, and quality of imagery and data collected during explorations;
- it better illuminates the ROV from above, providing unprecedented ROV visibility as well as significant improvement in the ROV pilot’s overall perspective of the surrounding seafloor;
- it carries two HD video cameras that increase the effective viewing area to almost 360 degrees, giving explorers a better sense of place during exploration.

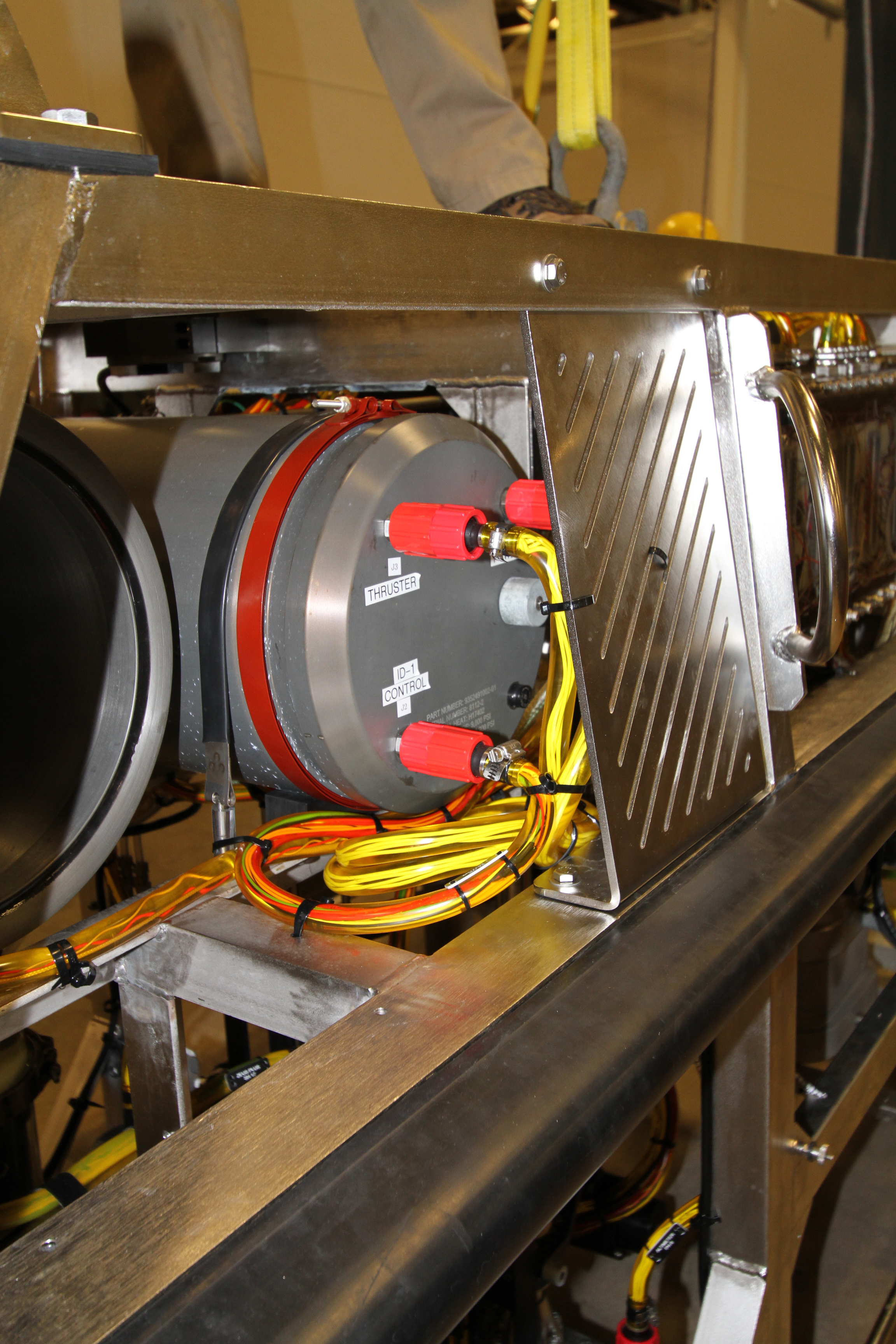
Seirios Camera Sled in the test tank after significant fabrication modifications, and engineering upgrades. Image courtesy of NOAA Office of Ocean Exploration and Research. Download image (jpg, 80 KB).
Given these factors, the GALREX 2011 team expects to collect stunning imagery during this leg of the cruise. It should be better than anything to date.
In either configuration (stand alone or in tandem), Seirios brings significant tools to deep-sea exploration and offers solutions to problems researchers using the old camera platform encountered at sea. To start with, scientists and engineers needed Seirios to be much more versatile. The original camera platform was not designed to be towed, and its shape and configuration did not allow for proper camera-to-light separation.
To address this, the NOAA OERdesign and engineering team, in collaboration with IFE, gave Seirios an entirely new shape, designing and building its stainless-steelframe as a towable body. The original camera sled was conical. At its base, it measured about 6 feet in diameter; at its top, it was just over 3 feet. The overall height was just under 7 feet, and the entire unit weighed about 2,200 lbs. The new shape — long and rectangular — increases Seirios’ capability to perform beyond the boundaries of the original role as strictly a depressor for the ROV. At 12 ft long, 3 ft wide, and just under 5 ft high, the Seirios frame tows much better than the original frame did through the water column. Under the right conditions, towing Seirios allows for very efficient use of time during exploration.
Seirios also features a larger area for packaging important equipment. Almost one-third of this new frame is open space, which increases the distance cameras can be separated from lighting. This reduces optical backscatter (light reflecting off particles or plankton) and allows for much higher quality imaging.
Seirios can be enhanced even further. Future advances in lighting and camera technology promise to allow far greater illuminating and optical capacity at power requirements similar to those we operate with now. New sensors or advanced technologies that measure water properties (chemistry, temperature, turbidity) and map features (laser and side scan and multibeam sonar) can be added to help scientists better understand the water column and the geological features being explored.
Little Hercules ROV being launched from NOAA Ship Okeanos Explorer. Video courtesy of NOAA Office of Ocean Exploration and Research, Galapágos Rift Expedition 2011. Download (mp4, 55.1 MB).

Little Hercules during one of his first dives in Indonesia. A number of organizations and people were critical to bringing him back. Image courtesy of NOAA Okeanos Explorer Program, INDEX-SATAL 2010. Download image (jpg, 700 KB).
The ship’s generators provide about 450 VAC 3-phase power to a ship-mounted power distribution unit (PDU). Electrical engineers designed the PDU to take that 450 VAC 3-phase power, boost it to about 2,800 VAC, and send it down the 8,000 m of cable. When the power reaches the camera-sled, it is reduced back down to 480 VAC, and then further distributed to Little Herc via a 40 m (120 ft) soft tether that connects the two vehicles together.
Also contained in this 8,000-m cable are 3 optical fibers — each smaller in diameter than a strand of human hair. All vehicle control and data and video transmission is done over these fibers.
Seirios and Little Herc are designed to go as deep as 4,000 m (13,123 ft). Future modifications to Seirios will soon push that limit to 6,000 m (19,685 ft).
The navigator keeps track of both vehicles’ positions in relation to each other on the bottom as well as in relation to the real world. This person also must know where their positions are in relation to the ship. The navigator communicates with the ROV pilots and the ship’s bridge, choreographing the “dance” among all parties and their respective equipment.
The ROV pilot “flies” Little Herc, and the ROV co-pilot “flies” Seirios. Together, the pilot and co-pilot keep the vehicles in proper relative position so Seirios is at no time “tugging” on Little Herc.
Completing the team, the video engineer controls the HD video cameras and is responsible for all aspects of the image quality, related to both cameras and lenses. This person must follow the pilots’ lead, ensuring the subject matter being videoed (or captured) is always in focus and has sufficient lighting.
Seirios also carries two, 5-horsepower electric thrusters that allow it to move both rotationally and laterally. Depth sensors, an altimeter, ultra-short baseline (USBL) acoustic tracking, sector scan imaging sonar, a conductivity-temperature-depth (CTD) sensor and several other “task” cameras are all standard equipment. With the upgrade to a towable and thruster-actuated camera sled system, the introduction of a compass and full color scanning sonar gives us directional reference as well as obstacle avoidance and the ability to see beyond the range of our cameras and lighting. This is particularly helpful when we explore the surrounding terrain.
In the two-body configuration, Seirios operates about 10 m (32 ft) above the seafloor. The ROV works directly below it, moving around much like a dog on a leash. In this mode, Seirios also acts as a depressor, decoupling movement and minimizing the degree of heave that reaches Little Herc.
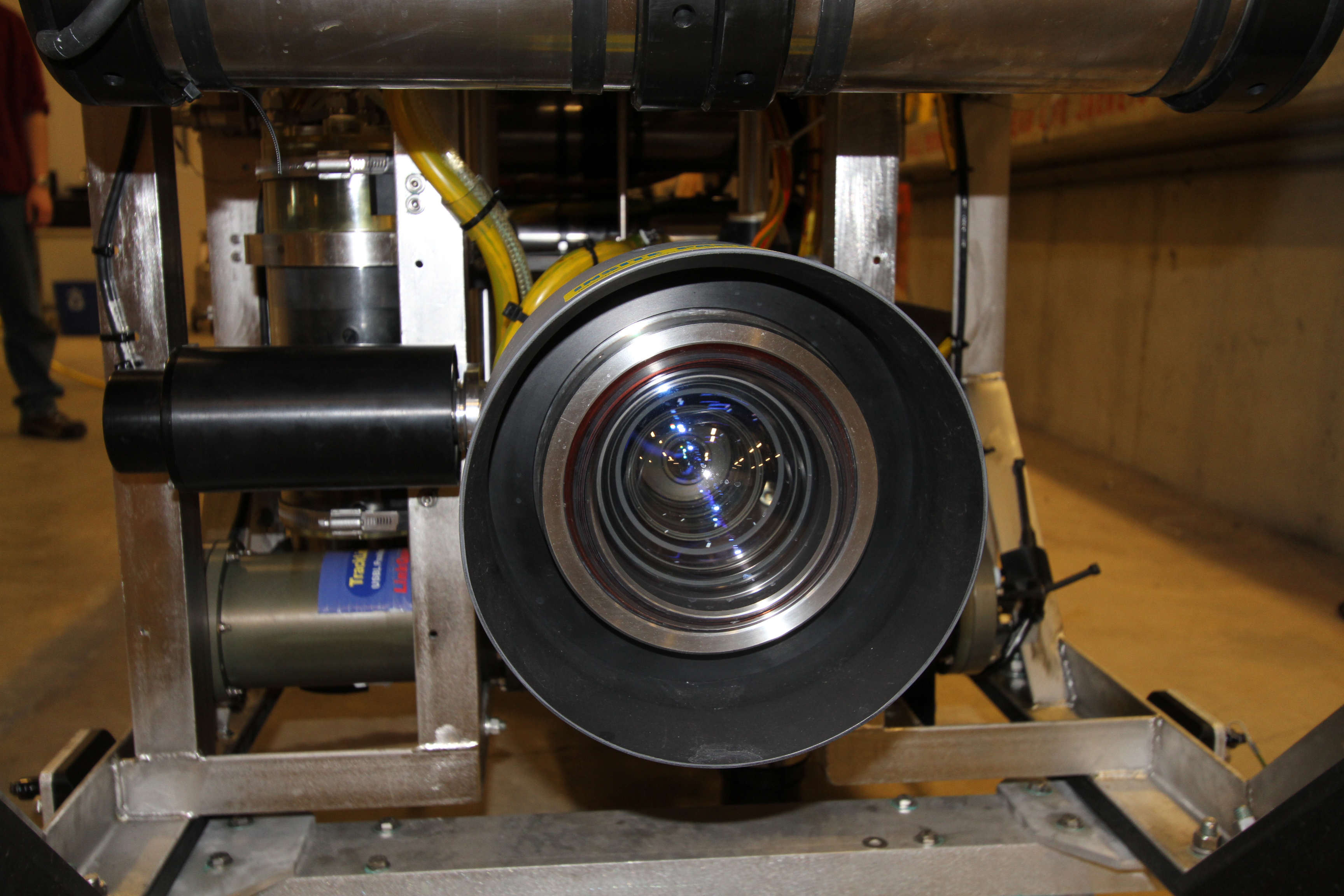
The additional bonus is the perspective this view affords the ROV pilot. Things the pilot could not see easily before are often revealed in Seirios’ forward-looking HD camera. A second HD camera is positioned in the center of the camera sled’s stainless-steel frame and mounted on a pan/tilt mechanism. The entire assembly (both camera and pan/tilt) is also attached to a pressure-actuated hydraulically driven bracket that telescopes up and down with the ascent and descent of the camera sled.
When Seirios is on the deck of the ship, this assembly is tucked up into the frame. When the vehicle is launched and begins its descent, the increasing water pressure moves this assembly downward below the frame, where the camera can rotate almost 360 degrees. This allows the co-pilot, who controls the operation of Seirios, to have a constant view of what is around the camera sled when it is working near the seafloor. In areas of very steep topography, this view is extremely important, because it affords both obstacle avoidance and situational awareness. This can mean the difference between operating the equipment safely or fouling it on the bottom, and either damaging or losing it entirely.
Video footage of the Seirios Camera Sled being launched from NOAA Ship Okeanos Explorer during the Galapagos Rift Expedition 2011. Video courtesy of NOAA Office of Ocean Exploration and Research, Galapágos Rift Expedition 2011. Download (mp4, 48.2 MB).
While this process is unfolding, the ship is either being held in position with the ship’s thrusters, or it is being moved slowly forward maintaining a very slight headway. Seirios, at this time, is still strapped down on the centerline of the fantail underneath the lifting A-frame. As soon as Little Herc is in the water, it is driven directly aft of the ship until it reaches the end of its tether. At this point, Little Herc is being towed very slowly backwards. This puts a significant tension on the tether that connects Little Herc to Seirios. Next, Seirios is lifted off the deck by the ROV traction winch, using the main electro-optical-mechanical cable that runs through the sheave on the top of the aft A-frame. Once Seirios is raised off the deck, the A-frame is boomed outward toward the stern of the ship until Seirios is completely suspended over the water. The winch operator, who is stationed one deck above the aft deck, where he maintains a birds-eye view of the activity, then lowers it into the water.
Once Seirios is in the water, the two vehicles begin their descent. As they descend, the vehicles stay streamed out aft of the ship, maintaining a 40 m separation between each of the vehicles so they never accidentally come in contact with each other. The descent rate is about 15 to 25 m/minute. Upon reaching 50 m depth, the vehicles are stopped and checked prior to continuing on to the seafloor.
The vehicles are recovered much the same way, only the process is now reversed. The vehicles are brought up from the seafloor until they reach 50 m depth. They are held there until all personnel required for the recovery are in their proper places. When everyone is ready, Seirios is brought to the surface using the traction winch, while Little Herc ascends at the same rate using its vertical thrusters. Again, while this is occurring, the ship is either holding position or moving slightly forward into the wind and/or current.
When both vehicles arrive at the surface, Little Herc must be streaming well aft of the ship. This is done to make sure the vehicle stays well clear of the ship’s propellers. When this configuration is secure, Seirios is the first to be brought up on deck. As is it lifted from the water up to deck level, the A-frame is boomed inward until Seirios is completely over the deck of the fantail. It is then lowered onto to the deck and immediately secured with cargo straps.
A lift line attached to Little Herc (which was/is temporarily married to the 40 m tether that separates Seirios from Little Herc) is now stripped away and attached to a small pulling winch mounted on the ROV lift crane. The winch is engaged, pulling Little Herc slowly backwards toward the ship until it is close enough to be lifted out of the water by the lift crane. Once this is done, Little Herc is swung over the side and returned to its dolly on the fantail. This completes the process of recovery.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}