















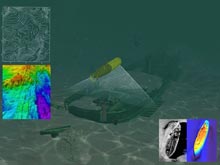
An autonomous underwater vehicle (AUV) is not driven by an operator; therefore, the AUV must be able to detect and avoid obstacles in its own path. The ability to sense its surroundings is called "situational awareness." Click image for larger view and image credit.
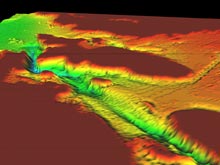
This bathymetric (water-depth measurement) map shows how variable an AUV's environment can be. Click image for larger view and image credit.

Divers help launch the REMUS AUV, which has been equipped with a video mosaic camera to survey Stellwagen Bank National Marine Sanctuary. Eventually, multiple AUVs will be launched together to work as a team — communicating and adapting to the mission as it unfolds. Click image for larger view and image credit.
AUV Intelligence
Christiane Duarte
Computer Scientist
Naval Undersea Warfare Center - Division Newport
![]() See how sonar mounted on AUVs can quickly and accurately image underwater objects. (Quicktime, 1 Mb)
See how sonar mounted on AUVs can quickly and accurately image underwater objects. (Quicktime, 1 Mb)
Autonomous underwater vehicles (AUVs) are categorized as robots. Similar to the Mars robots involved in planetary exploration, AUVs are designed to be operator-free vehicles that can function without a physical connection to the surface or to an operator. Underwater robots can operate in oceans, rivers, and in the intertidal zone of the beach; and they can be released for hours, days or even months before being picked up.
During a mission, AUVs have assigned tasks that may involve traveling a certain path and collecting information about the areas traveled. They can be configured with different sensors and communication systems to provide real-time information back on land or to a ship over the horizon. With limited or no interaction with an operator, AUVs must be designed with the intelligence to perform their tasks, identify problems, and adapt to different situations.
AUVs must safely complete the tasks set out in its mission, even if situations around the vehicle change. For instance, the AUV might encounter an obstacle as it follows its path to the survey site. To detect the obstacle, or another kind of problem, AUVs rely on sensors (that provide different pieces of information about the environment) and specialized software (that interprets the sensor inputs). The ability to recognize surroundings is called "situational awareness." The level of power required to operate the sensors can affect the level of awareness, and only a given number of sensors can fit an AUV. The bottom line: different AUVs have varying levels of situational awareness.
AUVs also need to decide what actions to take in a new situation, a characteristic called "adaptation." An AUV may need to maneuver around an obstacle, or it may receive new directions from the human operator on the surface or ashore that change the original mission. In this case, an AUV may need to plan and execute a new survey path in order to meet its new mission.
Different situations may call for either reactive or planning behaviors from an AUV. Reactive behaviors are called for when an AUV must respond quickly with an action and continue to react until the situation is resolved. Reacting to an obstacle in a path is such an example. Planning behaviors are used when AUVs have the time to evaluate options and select accordingly, such as determining the best path to reaching its destination. In this kind of decision, an AUV may need to consider safety, energy use, and time to reach the destination. That the AUV is considering more than one factor at a time is called a "multiple objectives problem." The ideal solution is a reasonable compromise that meets all objectives.
In the future, as a common language is developed to express tasking and to share mission status information, AUVs will become cooperative. Working together, AUVs will be able to complete tasks that could not be completed by a single vehicle alone. Cooperating AUVs will be able to report difficulties and request assistance from each other. They will decide assignments among themselves, and these can change throughout the mission. For instance, if the goals change during the mission, some vehicles may leave the original area to begin a new task, while other AUVs pick up the remaining tasks at the original site. Cooperative AUV groups will also allow a human operator to communicate to the group as a whole, rather than directing each system individually, making it easier to manage the vehicles.
Sign up for the Ocean Explorer E-mail Update List.