


























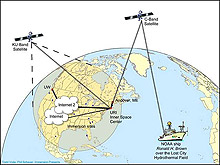
Diagram showing how video and data will be transmitted between the NOAA ship Ronald H. Brown, via satellite and Internet 2, to the Inner Space Center at URI, the University of Washington, and other participating sites. Click image for larger view and image credit. (HR)

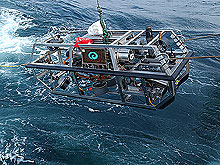
Artwork depicting the ROVs operating on the seafloor, connected to the surface ship. Onboard the ship are the control vans and satellite telecom system which beams the signals to shore. Click image for larger view and image credit. (HR)
Lost City 2005: Technology
Dwight F. Coleman
Director of Research
Institute for Exploration
Mystic Aquarium
Technology Specifications For Students
Telepresence Capability
Data Live from Inner Space: Lost City will be explored by IFE Remotely Operated Vehicles (ROV's) launched from the NOAA ship, Ronald H. Brown, for an estimated ten days during the expedition. While some of the scientists sit on the ship in the mid-Atlantic to see the data, others are located in "Inner Space Centers" thousands of miles away. In Narragansett, Rhode Island at University of Rhode Island Graduate School of Oceanography (URI-GSO) and in Seattle, Washington at University of Washington (UW), scientists will watch the exploration of the ROVs "in real-time".
This is possible because a satellite telecommunication van is perched aboard the ship, Ronald H. Brown where it transmits the images from the ROVs thousands of feet below. The images reach URI-GSO and UW within 1.5 seconds. This allows teams of scientists to examine the pictures, request samples, and suggest new areas to explore. This is among the first expeditions to use this newly-developed satellite set-up for examining underwater sites. Live "broadcasts" of the satellite images will be carried on this site.Inner Space Center: The Inner Space Center was created for the University of Rhode Island's Institute for Archaeological Oceanography to monitor, record, and distribute data in real time. The Center is based on the NASA command center model, so once video feeds and other data signals from the ROVs or the research vessel in the field are transmitted to a shipboard control center, they may then be directly broadcast through the satellite telecommunications system and be viewed on workstations throughout the USA. These workstations, which are equipped with Internet2 technology, provide students, faculty, and researchers with access to deep-sea expeditions, in real-time and on a 24-hour basis. Through telepresence, the Inner Space Center enables researchers and students to directly participate in a field study without physically being on the research vessel, so more individuals may play an active and helpful role during an expedition.

Archaeologists at the University of Rhode Island Inner Space Center viewing footage of the RMS Titanic shipwreck, as photographed from Hercules and sent in real time via satellite back to shore. Click image for larger view and image credit.

Archaeologist at the University of Rhode Island's Inner Space Center during the Titanic 2004 expedition, viewing footage from Hercules that was transmitted in real time via satellite. Click image for larger view and image credit.
Off the deck of the NOAA ship Ronald H. Brown, about to decend 4000 meters to the Titanic shipwreck site. Click image for larger view and image credit . (HR)
Remotely Operated Vehicles (ROVs)
Argus: A towed support sled that is tethered to either Hercules or Little Herc. The sled, which can dive to 6000 meters water depth, has the capacity to shoot video footage in High Definition and offer additional illumination for the ROVs. Argus hangs from the surface research vessel by a long fiber-optic cable and is primarily maneuvered by moving the surface ship and by raising or lowering the cable. Thrusters, which are electric motors with propellers, on Argus enable the pilot to rotate or stabilize the sled and also aim its lights and cameras towards sites of interest. While Argus responds to the motion of the surface ship, especially pitching, this motion is decoupled from the other ROVs.
Hercules: The first ROV built primarily for deep-sea archaeological excavations, it also excels at other oceanographic missions. The ROV is neutrally buoyant, moved by thrusters along each side, and capable of diving to 4000 meters water depth, While attached to Argus with a 30 m (100 ft) tether, Hercules is able to operate independently beneath the towsled, up to the end of its tether. The ROV is equipped with a High Definition video camera, several sensors that record scientific data, several scanning sonars for acoustic mapping, water sampling equipment, two manipulator arms, and storage areas for tools, artifacts, and other biological and/or geological samples.

Onboard the R/V Knorr in the Black Sea in 2003. Ready for launch to conduct artifact recoveries and test excavations from an ancient shipwreck. Engineer Todd Gregory completes a pre-dive check. Click image for larger view and image credit. (HR)

Hercules ROV photographed from Argus decending to the Titanic wreckage. Click image for larger view and image credit. (HR)
Little Herc: A relatively small ROV that is primarily used to gather high-quality video footage of underwater archaeological material or natural features. It too is capable of diving to 4000 meters water depth. The High Definition camera attached to Little Herc provides a very high level of detail to observers aboard the research vessel, and ashore. Like Hercules, this ROV is neutrally buoyant and is propelled by thrusters, so it can move easily in three dimensions. Little Herc's compact size also allows it to get close to specific objects or enter openings within shipwrecks.

In the Black Sea in 2000, onboard the M/V Northern Horizon, with knuckle-boom crane in background. Click image for larger view and image credit. (HR)

In Thunder Bay National Marine Sanctuary, Lake Huron, in 2002 surveying the wreckage of the vessel Montana. Click image for larger view and image credit. (HR)

NOAA Ship Ronald H. Brown in Woods Hole, 2004, immediately following the Titanic expedition. The satellite dish and control van can be seen on the forward 01 deck. Click image for larger view and image credit . (HR)
Research Vessel
Ronald H. Brown: The National Oceanic and Atmospheric Administration (NOAA) ship Ronald H. Brown is a multipurpose research vessel that is capable of supporting physical, chemical, biological, and geological oceanography research; atmospheric and climate studies; marine acoustics; bathymetry; and a multitude of interdisciplinary environmental investigations in coastal and deep ocean regions. The Ronald H. Brown, which has a length of 274 ft, a breadth of 52.5 ft, and a draft of 17ft, is one of America's most technologically advanced research ships and is equipped to support a wide range of academic research programs. The five primary laboratories provide approximately 4,000 square feetof research and mission space, and additional space on deck can accommodate up to nine laboratory vans. The ship is also equipped with a suite of scientific sensors, including a multibeam mapping system, sub-bottom profiler, acoustic Doppler current profiler, acoustic positioning system, and C-band Doppler radar. The Ronald H. Brown's maneuvering capabilities, which are provided by a dynamic positioning system, enhance the vessel's stability in the open ocean. The automated control of the stern and bow thrusters enables the ship to hold stationary within a 300-ft radius in seas up to 11 ft, a wind speed of 27 knots, and a 2-knot current. This capability is essential when deploying and recovering ROVs and underwater support elevators.

Onboard the R/V Knorr in the Black Sea in 2003. Pilots are controlling the Hercules ROV to collect some archaeological samples from the seafloor.Click image for larger view and image credit . (HR)
Vehicle Support Vans
Control Van: This is a 20 foot shipping container that has been strengthened and converted to support underwater vehicle operations onboard research vessels. It contains the primary electronic systems for controlling the ROVs while they are working beneath the ship. It is equipped with state-of-the-art high-definition video technologies, computer systems, and software systems for managing the multitude of video and data streams coming up the fiber optic wire from the vehicles. Teams of engineers and pilots that operate the vehicles sit in front of video and computer monitors controlling all aspects of the ROV dive, on 4-hour watch cycles totaling 24 hours per day for the entire duration of the dive, which can last several days.
Imaging Van: This is another converted shipping container that is mated to the Control Van. It contains similar video and computer display and control equipment for use by the scientists that are in charge of the entire mission. The scientists can independently observe all data and video steams, process data, and engage in conversations without disturbing the pilots and engineers in the Control Van. When necessary, through an intercom, the scientists communicate with the ROV pilots and others on the ship to provide instructions during the dive.

Scientist inside the imaging van viewing footage from the ROVs working on a site in the Black Sea in 2003. Click image for larger view and image credit. (HR)

View of the Imaging Van onboard the R/V Knorr in the Black Sea in 2003. Points of view from both Argus and Hercules as it retrieves and ancient amphora from a Roman period shipwreck. Click image for larger view and image credit. (HR)

During the Black Sea 2003 expedition, the satellite dish sits ontop its control van, which is adjacent to the ROV control vans on the deck of the R/V Knorr. Click image for larger view and image credit . (HR)
Satellite Van: This container supports the satellite telecommunication system that is onboard the research vessel. A large (3 meter diameter) satellite dish sits on top of or near the van and is controlled by hardware systems inside the van. The video and data streams that originate from the ROVs, and audio from the intercom in the control and imaging vans, are bundled into a data stream that is sent via satellite to a shore-based facility where the signals can be received in real-time.
Tool Van: This container is the primary "toolbox" for supporting the operation. It is equipped with a variety of tools, seagoing equipment, hardware, and spare parts. Engineers and technicians who work on the ROV systems rely on this van for fixing any problems that may occur, and coming up with innovative solutions to tackle the wide variety of challenges put forth by the scientists in charge of the expedition.