













Olympic Coast National Marine Sanctuary's rugged seafloor landscape is comprised of three major submarine canyons and scattered rocky features that support deep coral habitats. Click image for larger view and image credit.
Mission Plan
Preparing for the ROV cruise, we looked for hard-bottom seafloor sites that would likely harbor deep-sea coral and sponge communities. This required collecting and interpreting acoustic survey data from side-scan sonar and multibeam bathymetry, and included raw data from a companion survey effort in spring of 2006. With less than 20 percent of the sanctuary actually mapped for bottom habitat types, we chose dive sites within the mapped areas.
Our team produced planning maps showing areas around potential hard-bottom sites at depths from 100 to 650 meters (approximately 300 to 2,000 feet). We reviewed commercial bottom-fishing records to find sites in historically-fished and less-fished areas for evaluating previous fishing intensity. “Trawlable” vs. “non-trawlable” status of these sites was also evaluated from past NOAA Fisheries and Washington Department of Fish and Wildlife designations, which identify the presence of a rocky/bouldery habitat unsuitable for the deployment of bottom-trawl sampling gear.
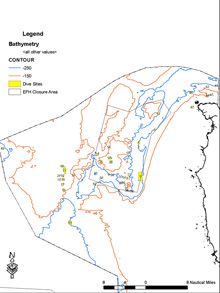
Map showing some of our dive targets in the northern portion of the sanctuary in relation to Essential Fish Habitat Conservation Area “Olympic 2”. Click image for larger view and image credit.
From this background information, we picked 48 potential sites. A stratified random approach was used to prioritize dive sites. The 48 sites were stratified into the following four categories: 1) trawled and inside the conservation area; 2) trawled and outside the conservation area; 3) not trawled and inside the conservation area; and 4) not trawled and outside the conservation area. Half of the sample areas within each stratum were randomly selected for sampling in 2006, and about one third of the sites (15) were successfully surveyed. The remaining sites will be sampled in future years. The 15 study locations were located both inside and outside the Essential Fish Habitat Conservation Area ![]() recently established by the Pacific Fishery Management Council
recently established by the Pacific Fishery Management Council ![]() . The Conservation Area in Olympic Coast National Marine Sanctuary went into effect on June 12, 2006, closing the area to bottom trawling by non-tribal fishermen. The Conservation Area in the sanctuary covers 159.4 square nautical miles, or about 15 percent of the sanctuary. The 2004 discovery of Lophelia pertusa in the sanctuary was a factor in the council's decision on the boundaries of the Conservation Area.
. The Conservation Area in Olympic Coast National Marine Sanctuary went into effect on June 12, 2006, closing the area to bottom trawling by non-tribal fishermen. The Conservation Area in the sanctuary covers 159.4 square nautical miles, or about 15 percent of the sanctuary. The 2004 discovery of Lophelia pertusa in the sanctuary was a factor in the council's decision on the boundaries of the Conservation Area.
We collected both video footage and digital still photographs along a series of three or more transects within each of the 15 hard-bottom sites. The video was collected continuously along each transect, and will be used to define the general nature and spatial extent of living and non-living features. The still photos were collected at multiple random locations (typically a minimum of 25) along each transect to obtain higher-resolution images of specific features and to quantify key biological and environmental factors, such as density, percent cover, diversity, incidence of dead or disturbed coral/sponge colonies, presence of lost fishing gear or other anthropogenic debris in relation to varying levels of fishing intensity. Frame grabs extracted from the video and video segments may be used along with the digital still photos depending on the quality of the imagery. Our procedure also included stopping the ROV along a transect when we encountered significant coral or sponge patches, to approach closer for diagnostic photographs and to occasionally take biological samples with the ROV’s manipulator arm for species identification or coral genetic studies.

The Canadian remotely-operated-vehicle ROPOS is launched from the deck of the McArthur II as another dive operation begins. Click image for larger view and image credit.

Deft handling is required in order to guide the robot arm to collect delicate samples -- a task made more difficult because the operator's real fingers are hundreds of meters above, and his only view of the work is through a video screen. Click image for larger view and image credit.
Sign up for the Ocean Explorer E-mail Update List.